
Abstract
A system composed of two cubic nonlinear oscillators with close natural frequencies, and thus displaying a 1:1 internal resonance, is studied both theoretically and experimentally, with a special emphasis on the free oscillations and the backbone curves. The instability regions of uncoupled solutions are derived and the bifurcation scenario as a function of the parameters of the problem is established, showing in an exhaustive manner all possible solutions. The backbone curves are then experimentally measured on a circular plate, where the asymmetric modes are known to display companion configurations with close eigenfrequencies. A control system based on a Phase-Locked Loop (PLL) is used to measure the backbone curves and also the frequency response function in the forced and damped case, including unstable branches. The model is used for a complete identification of the unknown parameters and an excellent comparison is drawn out between theoretical prediction and measurements.













Similar content being viewed by others
Notes
In practice the current intensity in the coil is measured, and is assumed to be proportional to the actual force with no phase lag.
References
Afaneh AA, Ibrahim RA (1993) Nonlinear response of an initially buckled beam with 1:1 internal resonance to sinusoidal excitation. Nonlinear Dyn 4(6):547–571
Arquier R, Karkar S, Lazarus A, Thomas O, Vergez C, Cochelin B (2005–2011) Manlab 2.0: an interactive path-following and bifurcation analysis software. Technical report, Laboratoire de Mécanique et d’Acoustique, CNRS. http://manlab.lma.cnrs-mrs.fr. Accessed 3 Sep 2019
Barton DAW (2017) Control-based continuation: bifurcation and stability analysis for physical experiments. Mech Syst Signal Process 84:54–64
Benedettini F, Rega G, Alaggio R (1995) Non-linear oscillations of a four-degree-of-freedom model of a suspended cable under multiple internal resonance conditions. J Sound Vib 182(5):775–798
Cammarano A, Hill TL, Neild SA, Wagg DJ (2014) Bifurcations of backbone curves for systems of coupled nonlinear two mass oscillator. Nonlinear Dyn 77(1):311–320
Chang SI, Bajaj AK, Krousgrill CM (1993) Non-linear vibrations and chaos in harmonically excited rectangular plates with one-to-one internal resonance. Non-linear Dyn 4:433–460
Denis V, Jossic M, Giraud-Audine C, Chomette B, Renault A, Thomas O (2018) Identication of nonlinear modes using phase-locked-loop experimental continuation and normal form. Mech Syst Signal Process 106:430–452
Doedel E, Paffenroth R, Champneys A, Fairgrieve T, Kuznetsov Y, Oldeman B, Sandstede B, Wang X (2002) Auto 2000: continuation and bifurcation software for ordinary differential equations. Technical report, Concordia University
Evensen DA (1968) Influence of nonlinearities on the degenerate vibration modes of a square plate. J Acoust Soc Am 44(1):84–89
Givois A, Grolet A, Thomas O, Deü JF (2019) On the frequency response computation of geometrically nonlinear flat structures using reduced-order finite element models. Nonlinear Dyn 97(2):1747–1781
Guillot L, Cochelin B, Vergez C (2018) A generic and efficient Taylor series based continuation method using aquadratic recast of smooth nonlinear systems. Int J Numer Methods Eng 9(4):261–280
Haddow AG, Barr ADS, Mook D (1984) Theoretical and experimental study of modal interaction in a two-degree-of-freedom structure. J Sound Vib 97:451–473
Hanson RJ, Anderson JM, Macomber HK (1994) Measurements of nonlinear effects in a driven vibrating wire. J Acoust Soc Am 96(3):1549–1556
Harrison H (1948) Plane and circular motion of a string. J Acoust Soc Am 20(6):874–875
Iooss G, Adelmeyer M (1998) Topics in bifurcation theory, 2nd edn. World scientific, New-York
Jossic M, Thomas O, Denis V, Chomette B, Mamou-Mani A, Roze D (2018) Effects of internal resonances in the pitch glide of chinese gongs. J Acoust Soc Am 144(1):431–442
Kerschen G, Peeters M, Golinval JC, Vakakis AF (2009) Nonlinear normal modes, part I: a useful framework for the structural dynamicist. Mech Syst Signal Process 23(1):170–194
Lazarus A, Thomas O (2010) A harmonic-based method for computing the stability of periodic solutions of dynamical systems. Comptes Rendus Mécanique 338(9):510–517
Lewandowski R (1994) Solutions with bifurcation points for free vibration of beams: an analytical approach. J Sound Vib 177(2):239–249
Lewandowski R (1996) On beams membranes and plates vibration backbone curves in cases of internal resonance. Meccanica 31(3):323–346
Manevitch AI, Manevitch LI (2003) Free oscillations in conservative and dissipative symmetric cubic two-degree-of-freedom systems with closed natural frequencies. Meccanica 38(3):335–348
Mojrzisch S, Twiefel J (2016) Phase-controlled frequency response measurement of a piezoelectric ring at high vibration amplitude. Arch Appl Mech 86(10):1763–1769
Monteil M, Thomas O, Touzé C (2015) Identification of mode couplings in nonlinear vibrations of the steelpan. Appl Acoust 89:1–15
Monteil M, Touzé C, Thomas O, Benacchio S (2014) Nonlinear forced vibrations of thin structures with tuned eigenfrequencies: the cases of 1:2:4 and 1:2:2 internal resonances. Nonlinear Dyn 75(1):175–200
Nayfeh AH (2000) Nonlinear interactions: analytical, computational and experimental methods. Wiley, New-York
Nayfeh AH, Lacarbonara W, Chin CM (1999) Nonlinear normal modes of buckled beams: three-to-one and one-to-one internal resonances. Nonlinear Dyn 18(3):253–273
Nayfeh AH, Mook DT (1979) Nonlinear oscillations. Wiley, New-York
Noël JP, Kerschen G (2017) Nonlinear system identification in structural dynamics: 10 more years of progress. Mech SystSignal Process 83:2–35
Noël JP, Schoukens M (2019) Cross-fertilising research in nonlinear system identification between the mechanical, control and machine learning fields: editorial statement. Mech Syst Signal Process 130:213–220
Peeters M, Kerschen G, Golinval JC (2011) Dynamic testing of nonlinear vibrating structures using nonlinear normal modes. J Sound Vib 330:486–509
Poincaré H (1892) Les méthodes nouvelles de la mécanique céleste. Gauthiers-Villars, Paris
Raman A, Mote CD Jr (2001) Effects of imperfection on the non-linear oscillations of circular plates spinning near critical speed. Int J Non-linear Mech 36:261–289
Renson L, Gonzalez-Buelga A, Barton DAW, Neild SA (2016) Robust identification of backbone curves using control-based continuation. J Sound Vib 367:145–158
Rosenberg RM (1966) On non-linear vibrations of systems with many degrees of freedom. Adv Appl Mech 9:155–242
Shaw S, Pierre C (1991) Nonlinear normal modes and invariant manifolds. J Sound Vib 150(1):170–173
Sieber J, Krauskopf B (2008) Control based bifurcation analysis for experiments. Nonlinear Dyn 51(3):365–377
Tan JJ, Touzé C, Cotté B (2015) Double polarisation in nonlinear vibrating piano strings. In: Proceedings of the third Vienna Talk on music acoustics. Vienna, Austria, pp 182–187
Thomas O, Lazarus A, Touzé C (2010) A harmonic-based method for computing the stability of periodic oscillations of nonlinear structural systems. In: ASME/IDETC 2010 International Design Engineering Technical Conference, Montreal, Québec, Canada
Thomas O, Touzé C, Chaigne A (2003) Asymmetric non-linear forced vibrations of free-edge circular plates, part 2: experiments. J Sound Vib 265(5):1075–1101
Thomas O, Touzé C, Chaigne A (2005) Non-linear vibrations of free-edge thin spherical shells: modal interaction rules and 1:1:2 internal resonance. Int J Solids Struct 42(11):3339–3373
Thomas O, Touzé C, Luminais E (2007) Non-linear vibrations of free-edge thin spherical shells: experiments on a 1:1:2 internal resonance. Nonlinear Dyn 49(1–2):259–284
Tien WM, Namachchivaya NS, Bajaj AK (1994) Non-linear dynamics of a shallow arch under periodic excitation, I: 1:2 internal resonance. Int J Non-linear Mech 29(3):349–366
Touzé C (2014) Modal Analysis of nonlinear Mechanical Systems, chapter Normal form theory and nonlinear normal modes: theoretical settings and applications. Springer Series CISM courses and lectures, vol. 555, ISBN 978-3-7091-1790-2
Touzé C, Amabili M (2006) Non-linear normal modes for damped geometrically non-linear systems: application to reduced-order modeling of harmonically forced structures. J Sound Vib 298(4–5):958–981
Touzé C, Thomas O, Chaigne A (2002) Asymmetric non-linear forced vibrations of free-edge circular plates. part 1: theory. J Sound Vib 258(4):649–676
Touzé C, Thomas O, Chaigne A (2004) Hardening/softening behaviour in non-linear oscillations of structural systems using non-linear normal modes. J Sound Vib 273(1–2):77–101
Williams CJH, Tobias SA (1963) Forced undamped non-linear vibrations of imperfect circular disks. J Mech Eng Sci 5:325–335
Yasuda K, Asano T (1986) Nonlinear foced oscillations of a rectangular membrane with degenerated modes. Bull JSME 29(255):3090–3095
Acknowledgements
A part of this study was funded by the French Ministry of Research and Arts et Métiers through the PhD grant of the first author. Another part of the research work presented in this paper has been realized during the doctoral thesis of Jin-Jack Tan in IMSIA, ENSTA Paris, and was funded by the european commission within the Initial Training Network (ITN) Marie Curie action project BATWOMAN, under the seventh framework program (EC grant Agreement No. 605867).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: derivation of first-order equations
This appendix gives the full detail of the derivation of the first-order slow-scale equations for the system of cubic oscillators featuring 1:1 internal resonance using the multiple scales method. The derivation is written for the forced and damped problem and is then finally reduced to free vibration by cancelling the forcing and damping terms. This allows us to give a unified presentation for the two cases, following closely the derivation shown in [45]. It is also mandatory for our presentation since the derivation of the instability region for the free vibration is derived from the forced and damped case, as explained below.
The starting point is thus the following equations of motion:
These two equations generalizes the case of free vibration considered in (1), by adding two different damping factors for each oscillator, \(\mu _1\) and \(\mu _2\), and two forcing terms with amplitudes \(F_1\) and \(F_2\), scaled at order \(\varepsilon\) since the primary resonance is investigated. These equations are close to those used in [45], except that two distinct damping terms are considered instead of a single one \(\mu = \mu _1 = \mu _2\) selected in [45]. Note also that in [45], the nonlinear stiffness terms were at the right-hand side of the equations of motions, so that the comparison can be drawn by simply changing the signs of \(\varGamma _1\), \(\varGamma _2\), \(C_1\) and \(C_2\).
The two detunings are introduced as
The first detuning \(\sigma _1\) quantifies the 1:1 internal resonance, while \(\sigma _2\) expresses the fact that a primary resonance is investigated so that \(\varOmega \simeq \omega _1\). The multiple scales method is introduced, with \(T_0=t\) a fast time scale and \(T_1=\varepsilon t\) a slow time scale. The unknown are expanded as \(X_i = X_{i1}(T_0,T_1) + \varepsilon X_{i2}(T_0,T_1)\). The first-order solution is easy to find and reads:
where c.c. stands for complex conjugate. The solvability conditions write, for the two unknown complex amplitudes \(A(T_1)\) and \(B(T_1)\) :
where \((\,)^\prime\) denotes the derivative with respect to the slow time scale \(T_1\). These two equations can be rewritten by considering the polar form for the two unknowns, such that \(A = a(T_1) \exp (i \alpha (T_1))\) and \(B = b(T_1) \exp (i \beta (T_1))\). The non-autonomous system for the amplitude and phases finally writes:
Note that in order to make the system (31) autonomous, one needs to introduce the following two additional variables
When forcing and damping terms are removed, Eq. (31) depends on only one angular variable, so that numerous different choices can be selected in order to make the system autonomous. In order to stay close to the notations used for the forced and damped system, the following change of coordinate is selected as:
This choice leads to the autonomous system given in Sect. 2, Eq. (6).
Appendix 2: instability region for the uncoupled solutions
In this section we derive the instability region of the uncoupled solutions for the free vibration case, from the analysis of the damped/forced system. The starting point is the instability regions derived in [39] for the forced/damped case, i.e. for the system (31), made autonomous using change of variable from Eq. (32). The analysis led in [45] shows that uncoupled solution where only the first mode is excited is unstable when this relationship is fulfilled :
Cancelling the damping by letting \(\mu =0\) in this equation leads to
The last step is to replace \(\sigma _2\), which is defined by (28b). However cancelling the forcing would result in \(\varOmega\) being undefined. Instead, one needs to map \(\varOmega\) to the nonlinear oscillation frequency in the free regime. \(\sigma _2\) is then the detuning allowing one to express this nonlinear frequency as a function of the linear eigenfrequency with \(\omega _{NL} = \omega _1 + \varepsilon \sigma _2\). Replacing \(\sigma _2\) with its expression as given by Eq. (35), one can finally obtain:
This equation shows that as soon as the nonlinear frequency of A-mode enters the region delimited by the two curves obtained with \(s=\pm \,1\), then the uncoupled solution becomes unstable. In order to derive the instability region for the B-mode, the same reasoning is applied using symmetric relationships, leading to:
Appendix 3: stability of the coupled solutions
The stability of the coupled solution is derived classically from the jacobian matric of (6). The general jacobian \({{\mathcal {J}}}\) reads, with \(S_{\gamma }=\sin 2(\gamma _1 - \gamma _2)\) and \(C_{\gamma }=\cos 2(\gamma _1 - \gamma _2)\) in order to ease notations:
The coupled solutions are characterized by specific relationships on the angles leading to simplification of \({{\mathcal {J}}}\). Indeed one has \(\sin 2(\gamma _1 - \gamma _2) = 0\) and \(\cos 2(\gamma _1 - \gamma _2) = s = \pm \, 1\). With these simplifications the \(4\times 4\) determinant of the jacobian matrix \({{\mathcal {D}}} = \hbox {det} ({{\mathcal {J}}} - \lambda {{\mathcal {I}}})\) with \({{\mathcal {I}}}\) the identity matrix can be analytically derived as:
Two eigenvalues are found to be zero which is logical for coupled solutions in four-dimensional phase space. The two other eigenvalues are solutions of
with \(s=+1\) for normal mode and \(s=-1\) for elliptic mode. Each mode (normal or alliptic) is stable as long as \(\lambda ^2 < 0\), which leads to the conclusion that stablity is governed only by the value of the scalar \(S_c = \frac{\varGamma _1 \omega _2}{C_2 \omega _1} + \frac{\varGamma _2 \omega _1}{C_1 \omega _2}\), the normal mode being stable as long as \(S_c < 2\), and the elliptic mode as long as \(S_c > 2/3\).
Appendix 4: parametric study: bifurcation scenario in the particular case without detuning
In this appendix, the particular case of perfectly equal eigenfrequencies \(\omega _1 = \omega _2\) with a vanishing detuning \(\sigma _1= 0\), is considered. In this case, the amplitude values for which the branch points \(I_{Ea}\), \(I_{Na}\), \(I_{Eb}\) and \(I_{Nb}\) (as defined in Eqs. (22) and (23)) are equal to zero: this means that the coupled solutions could exist from a vanishing amplitude. This is the direct consequence of the fact that, as \(\sigma _1= 0\), the gaps between the starting point of the A-mode and the B-mode backbone curves and their instability regions, does not exist anymore. The second consequence is also that uncoupled solutions are either always stable or always unstable, whatever the amplitude. Considering the coupled solutions, cancelling the values of all branch points does not mean that NM and EM always exist. Indeed, Eq (14), which defines the amplitude relationships for coupled solutions, rewrites with \(\sigma _1 = 0\)
with \(s=\pm \, 1\) for NM and EM. Consequently coupled solutions can exist if and only if the respective coefficients in front of the square amplitude have the same sign.
The stability chart that gives all possible solutions as function of the nonlinear coefficients is thus modified and shown in Fig. 14a. The main difference with the detuned case where \(\sigma _1 > 0\) is that the coupled solutions of finite extent can not exist anymore since all branch points have the same vanishing amplitude. This leads to modification of the lower right part of the stability chart to make it symmetric. The possible cases are discussed as function of the stability of the uncoupled mode, reported in Fig. 14a on the vertical and horizontal axes. Four cases exist:
-
Case 1 A-mode and B-mode are stable. This means that the backbone curve of each uncoupled solution is outside its instability region. It corresponds to the four edges of the stablity chart, in upper left, upper right, lower left and lower right regions. Two cases are then possible:
-
Case 1.1: if \(3\varGamma _1 < C_2\) and \(\varGamma _2 > C_1\), or if \(3\varGamma _2 < C_1\) and \(\varGamma _1 > C_2\). This case means that the backbone curve of the A-mode stays on the left of the instablity region while backbone curve of the B-mode is on the right (or vice-versa). Then in this case the coefficients of Eq.(41) have opposite signs, thus no coupled solutions exist.
-
Case 1.2: if \(3\varGamma _1 < C_2\) and \(3\varGamma _2 < C_1\) (case 1.2.1), or if \(\varGamma _1 > C_2\) and \(\varGamma _2 > C_1\) (case 1.2.2), the backbone curves of the A-mode and the B-mode are respectively on the same side of their instability regions. Then in this case both coupled solutions exist, and inspection of the values of \(S_c\) indicates that in case 1.2.1 NM is stable while EM is unstable, and case 1.2.2 leads to the contrary with NM unstable and EM stable.
-
-
Case 2 The A-mode and the B-mode are unstable. This means that each backbone curve is totally inside the instability region, so that \(C_2/3< \varGamma _1 < C_2\) and \(C_1/3< \varGamma _2 < C_1\). Then in this case both coupled solutions exist and are stable.
-
Case 3 The A-mode is unstable and the B-mode is stable. The instability of the A-mode is obtained thanks to the condition \(C_2/3< \varGamma _1 < C_2\). Two subcases are then possible:
-
If \(3\varGamma _2 < C1\), then EM does not exist, only NM is possible and is stable (case 3.1).
-
If \(\varGamma _2 > C_1\), then NM does not exist, only EM is possible and is stable (case 3.2).
-
-
Case 4 The B-mode is stable and the A-mode is unstable. This case can be simply deduced from the previous one by symmetry (changing the indices \(1 \rightleftarrows 2\)).
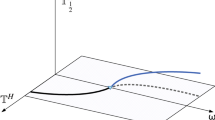
Figure 14b illustrates a case in the upper right region of the stability chart, in which both the A-mode and the B-mode are stable and the two coupled solutions exist: the NM is stable while the EM is unstable. Finally Fig. 14c, d shows the projection on the \((\omega ,a)\) and \((\omega ,b)\) for the case in the central region where both uncoupled solutions are unstable. In this case, the only stable solutions are the coupled branches, and both EM and NM are stable.

Stability analysis and bifurcation scenario in the case \(\sigma _1 = 0\), with fixed parameters as \(\omega _1=\omega _2=\pi\), \(\varGamma _1 = \varGamma _2=1\). a stability chart showing the possible solutions when varying the values of the coupling coefficients \(C_1\) and \(C_2\). b Three-dimensional representation of the solution branches in space \((\omega ,a,b)\), for \(C_1=C_2 = 5\). c–d Two-dimensional projections in the planes \((\omega ,a)\) and \((\omega ,b)\) for the case \(C_1=C_2 =25\). (Color figure online)
Rights and permissions
About this article

Cite this article
Givois, A., Tan, JJ., Touzé, C. et al. Backbone curves of coupled cubic oscillators in one-to-one internal resonance: bifurcation scenario, measurements and parameter identification. Meccanica 55, 481–503 (2020). https://doi.org/10.1007/s11012-020-01132-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-020-01132-2