
Abstract
Multibody models are useful to describe the macroscopic motion of the elements of physical systems. Modeling contact in such systems can be challenging, especially if friction at the contact interface is taken into account. Furthermore, the dynamics equations of multibody systems with contacts and Coulomb friction may become ill-posed due to friction coupling, as in the Painlevé paradox, where a solution for system dynamics may not be found. Here, the dynamics problem is considered following a general approach so that friction phenomena, such as dynamic jamming, can be analyzed. The effect of the contact forces on the velocity field of the system is the cornerstone of the proposed formulation, which is used to analyze friction coupling in multibody systems with a single contact. In addition, we introduce a new representation of the so-called generalized friction cone, a quadratic form defined in the contact velocity space. The geometry of this cone can be used to determine the critical cases where the solvability of the system dynamic equations can be compromised. Moreover, it allows for assessing friction coupling at the contact interface, and obtaining the values of the friction coefficient that can make the dynamics formulation inconsistent. Finally, the classical Painlevé example of a single rod and the multibody model of an articulated arm are used to illustrate how the proposed cone can detect the cases where the dynamic equations have no solution, or multiple solutions.






Similar content being viewed by others


Notes
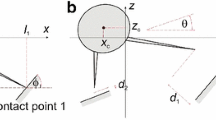
Interestingly, the original example used by Painlevé in [2] consists of a cylinder with one of its bases in contact with a slope, which is sliding down the slope with a velocity parallel to the surface. Although the mass distribution of the cylinder is different from the one of a rod, the same conclusions can be drown assuming one single contact point at the edge of the cylinder base.
References
Berger, E.: Friction modeling for dynamic system simulation. Appl. Mech. Rev. 55(6), 535 (2002)
Painlevé, P.: Sur les lois du frottement de glissement. C. R. Hebd. Séances Acad. Sci. 121, 112 (1895)
Painlevé, P.: Sur les lois du frottement de glissement. C. R. Hebd. Séances Acad. Sci. 141, 401 (1905)
Moreau, J.: Quadratic programming in mechanics: dynamics of one sided constraints. SIAM J. Control 4(1), 153 (1966)
Lötstedt, P.: Mechanical systems of rigid bodies subject to unilateral constraints. SIAM J. Appl. Math. 42(2), 281 (1982)
Lemke, C.: On complementary pivot theory. In: Mathematics of the Decision Sciences. Lectures in Applied Mathematics, vol. 2, p. 95 (1968)
Júdice, J., Pires, F.: Basic-set algorithm for a generalized linear complementarity problem. J. Optim. Theory Appl. 74(3), 391 (1992)
Murty, K.: Linear Complementarity, Linear and Nonlinear Programming. Heldermann, Berlin (1988)
Brogliato, B.: Nonsmooth Mechanics. Springer, Berlin (1999)
Panagiotopoulos, P.D.: In: Hemivariational Inequalities, pp. 99–134. Springer, Berlin (1993)
Glocker, C.: Set-Valued Force Laws. Springer, Troy, New York, USA (2001)
Stewart, D.E., Trinkle, J.C.: An implicit time-stepping scheme for rigid body dynamics with inelastic collisions and Coulomb friction. Int. J. Numer. Methods Eng. 39, 2673 (1996)
Anitescu, M., Potra, F.A.: Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity problems. Nonlinear Dyn. 14, 231 (1997)
Lötstedt, P.: Coulomb friction in two-dimensional rigid body systems. Z. Angew. Math. Mech. 61(12), 605 (1981)
Pfeiffer, F., Glocker, C.: Multibody Dynamics with Unilateral Contacts. Wiley, New York (1996)
Stewart, D.E.: Rigid-body dynamics with friction and impact. SIAM Rev. 42, 3 (2000)
Acary, V., Cadoux, F., Lemaréchal, C., Malick, J.: A formulation of the linear discrete coulomb friction problem via convex optimization. Z. Angew. Math. Mech. 91(2), 155 (2011)
Kaufman, D.M., Sueda, S., James, D.L., Pai, D.K.: Staggered projections for frictional contact in multibody systems. ACM Trans. Graph. 27(5), 164 (2008)
Anitescu, M., Tasora, A.: An iterative approach for cone complementarity problems for nonsmooth dynamics. Comput. Optim. Appl. 47(2), 207 (2010)
De Saxcé, G., Feng, Z.Q.: The bipotential method: a constructive approach to design the complete contact law with friction and improved numerical algorithms. Math. Comput. Model. 28(4–8), 225 (1998)
Li, J., Daviet, G., Narain, R., Bertails-Descoubes, F., Overby, M., Brown, G.E., Boissieux, L.: An implicit frictional contact solver for adaptive cloth simulation. ACM Trans. Graph. 37(4), 52 (2018)
Charles, A., Ballard, P.: The formulation of dynamical contact problems with friction in the case of systems of rigid bodies and general discrete mechanical systems—Painlevé and kane paradoxes revisited. Z. Angew. Math. Phys. 67(4), 99 (2016)
Moreau, J.J.: In: Nonsmooth Mechanics and Applications. CISM Courses & Lectures, pp. 1–82. Springer, Berlin (1988)
Batlle, J.A.: On Newton’s and Poisson’s rules of percussive dynamics. J. Appl. Mech. 60(2), 376 (1993)
Zhao, Z., Liu, C., Ma, W., Chen, B.: Experimental investigation of the Painlevé paradox in a robotic system. J. Appl. Mech. 75(4), 041006 (2008)
Batlle, J.A., Cardona, S.: The jamb (self-locking) process in three-dimensional collisions. J. Appl. Mech. 65(2), 417 (1998)
Stronge, W.J.: In: Proceedings of the Royal Society of London A: Mathematical, Physical and Engineering Sciences, vol. 431, pp. 169–181. The Royal Society, London (1990)
Génot, F., Brogliato, B.: New results on Painlevé paradoxes. Tech. Rep. RR-3366, INRIA (1998). https://hal.inria.fr/inria-00073323
Stewart, D.E.: Convergence of a time-stepping scheme for rigid-body dynamics and resolution of Painlevé’s problem. Arch. Ration. Mech. Anal. 145(3), 215 (1998)
Shen, Y., Stronge, W.: Painlevé paradox during oblique impact with friction. Eur. J. Mech. A, Solids 30(4), 457 (2011)
Leine, R.I., Brogliato, B., Nijmeijer, H.: Periodic motion and bifurcations induced by the Painlevé paradox. Eur. J. Mech. A, Solids 21(5), 869 (2002)
Or, Y., Rimon, E.: Investigation of Painlevé’s paradox and dynamic jamming during mechanism sliding motion. Nonlinear Dyn. 67(2), 1647 (2012)
Erdmann, M.: On a representation of friction in configuration space. Int. J. Robot. Res. 13(3), 240 (1994)
Flores, P.: Concepts and Formulations for Spatial Multibody Dynamics. Springer, Berlin (2015)
Wit, C.C.D., Olsson, H., Astrom, K.J., Lischinsky, P.: A new model for control of systems with friction. IEEE Trans. Autom. Control 40(3), 419 (1995)
Kövecses, J.: Dynamics of mechanical systems and the generalized free-body diagram—Part I: general formulation. J. Appl. Mech. 75, 061012 (2008)
Kövecses, J., Font-Llagunes, J.M.: An eigenvalue problem for the analysis of variable topology mechanical systems. J. Comput. Nonlinear Dyn. 4(3), 031006 (2009)
Font-Llagunes, J.M., Barjau, A., Pàmies-Vilà, R., Kövecses, J.: Dynamic analysis of impact in swing-through crutch gait using impulsive and continuous contact models. Multibody Syst. Dyn. 28(3), 257 (2012)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Peiret, A., Kövecses, J. & Font-Llagunes, J.M. Analysis of friction coupling and the Painlevé paradox in multibody systems. Multibody Syst Dyn 45, 361–378 (2019). https://doi.org/10.1007/s11044-018-09656-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-018-09656-y