
Abstract
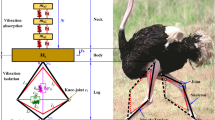
To improve the vibration isolation performance and bandwidth, loading capacity and supporting stability of passive vibration isolation system by utilizing nonlinearity, a bio-inspired embedded X-shaped vibration isolation (BIE-XVI) structure is proposed considering muscle/tendon contractile functions, joint rotational friction and connecting rod mass simultaneously. Furthermore, the dynamic model with pure linear elements and geometric relationship are established and the nonlinear variation properties are investigated. The effects of the key parameters of the BIE-XVI structure on frequency response characteristics and vibration isolation range are analyzed thoroughly by incremental harmonic balance method in various working conditions. From the parametric investigations, it can be found that the sensitivities of the nonlinear resonance properties are markedly different with respect to the different structure parameters. For longer rod length, larger assembly angle and higher stiffnesses, the hardening nonlinearity is weakened, but the resonance peak does not necessarily decrease. Besides, the softening nonlinearity and hardening nonlinearity can be interconverted with changing isolated mass and excitation amplitude. The BIE-XVI structure can widen the isolation frequency range and reduce the resonance peak to improve the vibration isolation properties by adjusting/designing the structural parameters, which could realize quasi-zero-stiffness property for vibration isolation.






















Similar content being viewed by others

References
Ibrahim, R.: Recent advances in nonlinear passive vibration isolators. J. Sound Vib. 314(3), 371–452 (2008)
Balaji, P.S., SelvaKumar, K.K.: Applications of nonlinearity in passive vibration control: a review. J. Vib. Eng. Technol. 9, 183–213 (2021)
Lu, Z.Q., Chen, L.Q.: Some recent progresses in nonlinear passive isolations of vibrations. Chin. J. Theo. Appl. Mech. 49(3), 550–564 (2017)
Carrella, A., Brennan, M.J., Waters, T.P., Jr., Lopes, V.: Force and displacement transmissibility of a nonlinear isolator with high-static-low-dynamic-stiffness. Int. J. Mech. Sci. 55, 22–29 (2012)
Le, T.D., Ahn, K.K.: Experimental investigation of a vibration isolation system using negative stiffness structure. Int. J. Mech. Sci. 70, 99–112 (2013)
Huang, X.C., Liu, X.T., Sun, J.Y., Zhang, Z.Y.: Vibration isolation characteristics of a nonlinear isolator using Euler buckled beam as negative stiffness corrector: a theoretical and experimental study. J. Sound Vib. 333(4), 1132–1148 (2014)
Huang, X.C., Liu, X.T., Hua, H.X.: Effects of stiffness and load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under base displacement excitation. Int. J. Nonlin. Mech. 65, 32–43 (2015)
Wang, X.L., Zhou, J.X., Xu, D.L., Ouyang, H.J., et al.: Force transmissibility of a two-stage vibration isolation system with quasi-zero stiffness. Nonlinear Dynam. 87, 633–646 (2017)
Chang, Y.P., Zhou, J.X., Wang, K., Xu, D.L.: A quasi-zero-stiffness dynamic vibration absorber. J. Sound Vib. 494, 115859 (2021)
Zhou, J.X., Wang, K., Xu, D.L., Ouyang, H.J., et al.: Vibration isolation in neonatal transport by using a quasi-zero-stiffness isolator. J. Vib. Control 24(15), 3278–3291 (2018)
Zhou, J.X., Wang, K., Xu, D.L., Ouyang, H.J., et al.: A six degrees-of-freedom vibration isolation platform supported by a hexapod of quasi-zero-stiffness struts. J. Vib. Acoust. 139(3), 034502 (2017)
Wang, X.L., Zhou, J.X., Xu, D.L., Ouyang, H.J., et al.: Force transmissibility of a two-stage vibration isolation system with quasi-zero stiffness. Nonlinear Dynam. 87(1), 633–646 (2017)
Liu, C.R., Tang, J., Yu, K.P., Liao, B.P., et al.: On the characteristics of a quasi-zero-stiffness vibration isolator with viscoelastic damper. Appl. Math. Model. 88, 367–381 (2020)
Sun, M.N., Song, G.Q., Li, Y.M., Huang, Z.L.: Effect of negative stiffness mechanism in a vibration isolator with asymmetric and high-static-low-dynamic stiffness. Mech. Syst. Signal Pr. 124, 388–407 (2019)
Yan, G., Zou, H.X., Wang, S., Zhao, L.C.: Large stroke quasi-zero stiffness vibration isolator using three-link mechanism. J. Sound Vib. 478, 115344 (2020)
Zhang, Z., Zhang, Y.W., Ding, H.: Vibration control combining nonlinear isolation and nonlinear absorption. Nonlinear Dynam. 100, 2121–2139 (2020)
Liu, C.R., Yu, K.P., Liao, B.P., Hu, R.P.: Enhanced vibration isolation performance of quasi-zero-stiffness isolator by introducing tunable nonlinear inerter. Commun. Nonlinear Sci. 95, 105654 (2021)
Yan, G., Zou, H.X., Wang, S., Wu, L.Y., Zhang, W.M.: Bio-inspired vibration Isolation: methodology and design. Appl. Mech. Rev. 73, 020801 (2021)
Chai, Y.Y., Jing, X.J., Chao, X.: X-shaped mechanism based enhanced tunable QZS property for passive vibration isolation. Int J. Mech. Sci. 218, 107077 (2022)
Zhang, W., Zhao, J.B.: Analysis on nonlinear stiffness and vibration isolation performance of scissor-like structure with full types. Nonlinear Dynam. 86, 17–36 (2016)
Pan, H.H., Jing, X.J., Sun, W.C., Gao, H.J.: A bioinspired dynamics-based adaptive tracking control for nonlinear suspension systems. IEEE Trans. Contr. Syst. Technol. 26(3), 903–914 (2018)
Pan, H.H., Jing, X.J., Sun, W.C., Li, Z.C.: Analysis and design of a bioinspired vibration sensor system in noisy environment. IEEE-ASME T. Mech. 23(2), 845–855 (2018)
Dai, H.H., Jing, X.J., Wang, Y., Yue, X.K., et al.: Post-capture vibration suppression of spacecraft via a bio-inspired isolation system. Mech. Syst. Signal Process. 105, 214–240 (2018)
Dai, H.H., Jing, X.J., Sun, C., Wang, Y., et al.: Accurate modeling and analysis of a bio-inspired isolation system: with application to on-orbit capture. Mech. Syst. Signal Process. 109, 111–133 (2018)
Dai, H.H., Cao, X.Y., Jing, X.J., Wang, X., et al.: Bio-inspired anti-impact manipulator for capturing non-cooperative spacecraft: theory and experiment. Mech. Syst. Signal Process. 142, 106785 (2020)
Sun, B., Jing, X.J.: A tracked robot with novel bio-inspired passive “legs.” Robot. Biomim. 4(18), 1–14 (2017)
Hu, F., Jing, X.J.: A 6-DOF passive vibration isolator based on Stewart structure with X-shaped legs. Nonlinear Dynam. 91(1), 157–185 (2018)
Jing, X.J., Zhang, L.L., Feng, X., Sun, B., et al.: A novel bio-inspired anti-vibration structure for operating hand-held jackhammers. Mech. Syst. Signal Process. 118, 317–339 (2019)
Li, M., Jing, X.J.: A bistable X-structured electromagnetic wave energy converter with a novel mechanical-motion-rectifier: design, analysis, and experimental tests. Energy Convers. Manage. 244, 114466 (2021)
Feng, X.F., Jing, X.J.: Human body inspired vibration isolation: Beneficial nonlinear stiffness, nonlinear damping and nonlinear inertia. Mech. Syst. Signal Process. 117, 786–812 (2019)
Feng, X., Jing, X.J., Xu, Z.D., Guo, Y.Q.: Bio-inspired anti-vibration with nonlinear inertia coupling. Mech. Syst. Signal Process. 124, 562–595 (2019)
Wang, Y., Jing, X.J., Guo, Y.Q.: Nonlinear analysis of a bio-inspired vertically asymmetric isolation system under different structural constraints. Nonlinear Dynam. 95, 445–464 (2019)
Jiang, G.Q., Jing, X.J., Guo, Y.Q.: A novel bio-inspired multi-joint anti-vibration structure and its nonlinear HSLDS properties. Mech. Syst. Signal Process. 138, 106552 (2020)
Bian, J., Jing, X.J.: Analysis and design of a novel and compact X-structured vibration isolation mount (X-Mount) with wider quasi-zero-stiffness range. Nonlinear Dynam. 101, 2195–2222 (2020)
Bian, J., Jing, X.J.: A nonlinear X-shaped structure based tuned mass damper with multi-variable optimization (X-absorber). Commun. Nonlinear Sci. 99, 105829 (2021)
Liu, H.P., Xiao, K.L., Zhao, P.P., Zhu, D.M.: Theoretical and experimental studies of a novel nested oscillator with a high-damping characteristic. J. Vib. Control 27(13), 1479–1497 (2021)
Liu, G.Y., Zhao, P.P., Liu, H.P., Shen, H.X.: Study on performance of a novel high-damping vibration isolator with nested X-shaped structure. J. Hunan Univ. (Nat. Sci.) 48(2), 31–37 (2021)
Yao, G., Yu, Y.H., Zhang, Y.M., Wu, Z.H.: Vibration isolation characteristics analysis of X-shaped quasi-zero stiffness vibration isolator. J. Northeast Univ. (Nat. Sci.) 41(5), 662–666 (2020)
Yin, M.M., Ding, H., Chen, L.Q.: Dynamic design and analysis of X-shaped quasi-zero stiffness vibration isolator. J. Dynam. Control 19(5), 46–52 (2021)
Yang, J., Xiong, Y.P., Xing, J.T.: Vibration power flow and force transmission behaviour of a nonlinear isolator mounted on a nonlinear base. Int. J. Mech. Sci. 115, 238–252 (2016)
Acknowledgements
The project is supported by Fundamental Research Funds for the Central Universities (No. N2103008) and Natural Science Foundation of China (No. 51805075).
Author information
Authors and Affiliations
Contributions
SZ helped in conceptualization, formal analysis, writing—original draft, writing—review and editing. YL contributed to formal analysis, visualization. ZJ developed the software. ZR investigated the study.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Data availability
All data generated or analyzed during this study are included in this published article [and its supplementary information files].
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A
Appendix A
The Taylor series expansions of fj(y), gj(y) fc(y), fk(y) and hm(y) are presented as follows
Rights and permissions
About this article

Cite this article
Zhou, S., Liu, Y., Jiang, Z. et al. Nonlinear dynamic behavior of a bio-inspired embedded X-shaped vibration isolation system. Nonlinear Dyn 110, 153–175 (2022). https://doi.org/10.1007/s11071-022-07610-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-022-07610-4