
Abstract
Developing self-organised swarm systems capable of adapting to environmental changes as well as to dynamic situations is a complex challenge. An efficient labour division model, with the ability to regulate the distribution of work among swarm robots, is an important element of this kind of system. This paper extends the popular response threshold model and proposes a new adaptive response threshold model (ARTM). Experiments were carried out in simulation and in real-robot scenarios with the aim of studying the performance of this new adaptive model. Results presented in this paper verify that the extended approach improves on the adaptability of previous systems. For example, by reducing collision duration among robots in foraging missions, our approach helps small swarms of robots to adapt more efficiently to changing environments, thus increasing their self-sustainability (survival rate). Finally, we propose a minimal version of ARTM, which is derived from the conclusions drawn through real-robot and simulation results.

























Similar content being viewed by others

Notes
The response curve corresponds to the plot of the response probability \(P_{f}\) as a function of the stimulus \(S_{(t)}\).
Sum of the heights equal to 1
Fig. 18 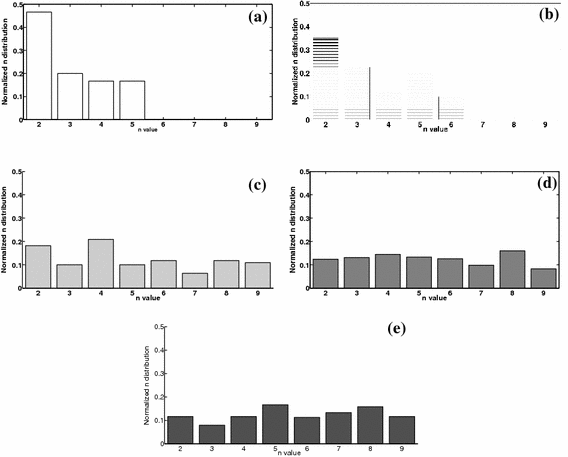
Normalised n distribution for the simulations that a “died” within the first 5 min of the simulation time; b “died” within the second 5 min of the simulation time; c “died” within the third 5 min of the simulation time; d “died” within the fourth 5 min of the simulation time; e that remained “alive” during the whole simulation time . a 1st quarter, b 2nd quarter, c 3th quarter, d 4th quarter, e successful simulations

References
Agassounon, W., & Martinoli, A. (2002). Efficiency and robustness of threshold-based distributed allocation algorithms in multi-agent systems. In Proceedings of the first international joint conference on autonomous agents and multiagent systems: Part 3, ACM, New York, NY, USA, AAMAS ’02 (pp. 1090–1097). doi:10.1145/545056.545077
Ashikaga, M., Kikuchi, M., Hiraguchi, T., Sakura, M., Anonuma, H., & Ota, J. (2007). Foraging task of multiple mobile robots in a dynamic environment using adaptive behavior in crickets. Journal of Robotics and Mechatronics, 19(4), 446–473.
Bailong, L., Rubo, Z., & Changting, S. (2008). Response threshold model of aggregation in a swarm: A theoretical and simulative comparison. In IEEE congress on evolutionary computation, 2008. CEC 2008 (IEEE world congress on computational intelligence) (pp. 1103–1109). doi:10.1109/CEC.2008.4630934
Beshers, S. N., & Fewell, J. H. (2001). Models of division of labor in social insects. Annual Review of Entomology, 46(1), 413–440. doi:10.1146/annurev.ento.46.1.413.
Bolmsjö, G., Danielsson, F., & Svensson, B. (2012). Collaborative robots to support flexible operation in a manufacturing system. In Proceedings of the flexible automation and intelligent manufacturing, FAIM 2012, Tampere University of Technology, Department of Production Engineering (pp. 531–538).
Bonabeau, E., Theraulaz, G., & Deneubourg, J.-L. (1998). Fixed response thresholds and the regulation of division of labor in insect societies. Bulletin of Mathematical Biology, 60(4), 753–807. doi:10.1006/bulm.1998.0041.
Castello, E., Yamamoto, T., Nakamura, Y., & Ishiguro, H. (2013). Task allocation for a robotic swarm based on an adaptive response threshold model. In 2013 13th international conference on control, automation and systems (ICCAS), IEEE (pp. 259–266). doi:10.1109/ICCAS.2013.6703905
Castello, E., Yamamoto, T., Nakamura, Y., & Ishiguro, H. (2014). Foraging optimization in swarm robotic systems based on an adaptive response threshold model. Advanced Robotics, 28(20), 1343–1356. doi:10.1080/01691864.2014.939104.
Chen, J., Gauci, M., Price, M. J., & Groß, R. (2012). Segregation in swarms of e-puck robots based on the Brazil nut effect. In Proceedings of the 11th international conference on autonomous agents and multiagent systems—Volume 1, international foundation for autonomous agents and multiagent systems, Richland, SC, AAMAS ’12 (pp. 163–170).
Chitta, S., Jones, E., Ciocarlie, M., & Hsiao, K. (2012). Mobile manipulation in unstructured environments: Perception, planning, and execution. IEEE Robotics Automation Magazine, 19(2), 58–71. doi:10.1109/MRA.2012.2191995.
Cianci, C. M., Raemy, X., Pugh, J., & Martinoli, A. (2007). Communication in a swarm of miniature robots: The e-puck as an educational tool for swarm robotics. In Proceedings of the 2nd international conference on swarm robotics, Springer-Verlag, Berlin, Heidelberg, SAB’06 (pp. 103–115).
D’Andrea, R. (2012). Guest editorial: A revolution in the warehouse: A retrospective on Kiva systems and the grand challenges ahead. IEEE Transactions on Automation Science and Engineering, 9(4), 638–639. doi:10.1109/TASE.2012.2214676.
Escobedo, R., Muro, C., Spector, L., & Coppinger, R. P. (2014). Group size, individual role differentiation and effectiveness of cooperation in a homogeneous group of hunters. Journal of The Royal Society Interface, 11(95). doi:10.1098/rsif.2014.0204
Gerkey, B. P., & Matarić, M. J. (2000). Murdoch: Publish/subscribe task allocation for heterogeneous agents. In Proceedings of the fourth international conference on autonomous agents, ACM, New York, NY, USA, AGENTS ’00 (pp. 203–204). doi:10.1145/336595.337369
Gerkey, B. P., Vaughan, R. T., & Howard, A. (2003). The player/stage project: Tools for multi-robot and distributed sensor systems. In Proceedings of the 11th international conference on advanced robotics, IEEE (pp. 317–323).
Goldberg, D., & Matarić, M. (1997). Interference as a tool for designing and evaluating multi-robot controllers. In Proceedings, AAAI-97, AAAI Press (pp. 637–642).
Jin, K., Liang, P., & Beni, G. (1994). Stability of synchronized distributed control of discrete swarm structures. In 1994 IEEE international conference on robotics and automation, 1994 (Vol. 2, pp. 1033–1038). doi:10.1109/ROBOT.1994.351221
Jun, J.-H., Lee, D.-W., Sim, & K.-B. (1999). Realization of cooperative strategies and swarm behavior in distributed autonomous robotic systems using artificial immune system. In 1999 IEEE International conference on systems, man, and cybernetics, IEEE SMC ’99 conference proceedings (Vol. 6, pp. 614–619). doi:10.1109/ICSMC.1999.816622
Kanakia, A., Klingner, J., & Correll, N. (2014). A response threshold sigmoid function model for swarm robot collaboration. In Proceedings of international symposium on distributed autonomous robotic systems (DARS), Springer Tracts on Advanced Robotics, Daejeon, Korea (In press).
Kashiwagi, A., Urabe, I., Kaneko, K., & Yomo, T. (2006). Adaptive response of a gene network to environmental changes by fitness-induced attractor selection. PloS One, 1(1), e49.
Keshmiri, S., & Payandeh, S. (2011). A centralized framework to multi-robots formation control: Theory and application. In Proceedings o the CARE@AI 2009 and CARE@IAT 2010 international conference on collaborative agents—Research and development, Springer-Verlag, Berlin, Heidelberg, CARE@AI’09/CARE@IAT’10 (pp. 85–98).
Krieger, M. J., & Billeter, J.-B. (2000). The call of duty: Self-organised task allocation in a population of up to twelve mobile robots. Robotics and Autonomous Systems, 30(12), 65–84. doi:10.1016/S0921-8890(99)00065-2.
Krieger, M. J. B., Billeter, J.-B., & Keller, L. (2000). Ant-like task allocation and recruitment in cooperative robots. Nature, 406(6799), 992–995.
Labella, T. H., Dorigo, M., & Deneubourg, J.-L. (2006). Division of labor in a group of robots inspired by ants’ foraging behavior. ACM Transactions on Autonomous and Adaptive Systems (TAAS), 1(1), 4–25. doi:10.1145/1152934.1152936.
Lee, W., & Kim, D. (2014). Adaptive division of labor in multi-robot system with minimum task switching. In ALIFE 14: Proceedings of the fourteenth international conference on the synthesis and simulation of living systems, MIT Press (pp. 750–756). doi:10.7551/978-0-262-32621-6-ch120
Lerman, K., Jones, C., Galstyan, A., & Matarić, M. J. (2006). Analysis of dynamic task allocation in multi-robot systems. The International Journal of Robotics Research, 25(3), 225–241. doi:10.1177/0278364906063426.
Liu, C., & Kroll, A. (2012). A centralized multi-robot task allocation for industrial plant inspection by using A* and genetic algorithms. In Proceedings of the 11th international conference on artificial intelligence and soft computing—Volume part II, Springer-Verlag, Berlin, Heidelberg, ICAISC’12 (pp. 466–474). doi:10.1007/978-3-642-29350-456
Liu, W., & Winfield, A. F. T. (2010). Modeling and optimization of adaptive foraging in swarm robotic systems. The International Journal of Robotics Research, 29(14), 1743–1760.
Liu, W., & Winfield, A. F. T. (2011). Open-hardware e-puck linux extension board for experimental swarm robotics research. Microprocessors and Microsystems—Embedded Hardware Design, 35(1), 60–67.
Liu, Y., Passino, K., & Polycarpou, M. (2003). Stability analysis of m-dimensional asynchronous swarms with a fixed communication topology. IEEE Transactions on Automatic Control, 48(1), 76–95. doi:10.1109/TAC.2002.806657.
Mondada, F., Bonani, M., Raemy, X., Pugh, J., Cianci, C., Klaptocz, A., et al. (2009). The e-puck, a robot designed for education in engineering. In Proceedings of the 9th conference on autonomous robot systems and competitions, IEEE (pp. 59–65).
Morozovsky, N., & Bewley, T. (2013). Skysweeper: A low dof, dynamic high wire robot. In 2013 IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE/RSJ (pp. 2339–2344).
Nurzaman, S., Matsumoto, Y., Nakamura, Y., Koizumi, S., & Ishiguro, H. (2008). Yuragi-based adaptive searching behavior in mobile robot: From bacterial chemotaxis to levy walk. In International conference on robotics and biomimetics, 2008. ROBIO 2008, IEEE (pp. 806–811). doi:10.1109/ROBIO.2009.4913103
Parker, L. (1994). Alliance: An architecture for fault tolerant, cooperative control of heterogeneous mobile robots. In Proceedings of the IEEE/RSJ/GI international conference on intelligent robots and systems. ’Advanced Robotic Systems and the Real World’, IROS ’94., IEEE/RSJ/GI (Vol. 2, pp. 776–783). doi:10.1109/IROS.1994.407550
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T. B., Leibs, J., et al. (2009). ROS: An open-source robot operating system. In Proc. open-source software workshop of the international conference on robotics and automation (ICRA), IEEE
Reggente, M., & Lilienthal, A. (2009). Using local wind information for gas distribution mapping in outdoor environments with a mobile robot. In IEEE Sensors, 2009 (pp. 1715–1720). doi:10.1109/ICSENS.2009.5398498
Shimizu, Y., Tsuru, S., Ito, Y., Ying, B.-W., & Yomo, T. (2011). Stochastic switching induced adaptation in a starved Escherichia coli population. PLoS One, 6(9), e23,953.
Song, Z., & Vaughan, R. (2013). Sustainable robot foraging: Adaptive fine-grained multi-robot task allocation for maximum sustainable yield of biological resources. In 2013 IEEE/RSJ international conference on intelligent robots and systems (IROS), IEEE/RSJ (pp. 3309–3316). doi:10.1109/IROS.2013.6696827
Stergiopoulos, Y., & Tzes, A. (2011). Decentralized swarm coordination: A combined coverage/connectivity approach. Journal of Intelligent & Robotic Systems, 64(3–4), 603–623. doi:10.1007/s10846-010-9537-1.
Suter, M., Zhang, L., Siringil, E., Peters, C., Luehmann, T., Ergeneman, O., et al. (2013). Superparamagnetic microrobots: Fabrication by two-photon polymerization and biocompatibility. Biomedical Microdevices, 15(6), 997–1003.
Theraulaz, G., Goss, S., Gervet, J., & Deneubourg, J.-L. (1990). Task differentiation in Polistes wasp colonies: A model for self-organizing groups of robots. Proceedings of the first international conference on simulation of adaptive behavior on from animals to animats (pp. 346–355). Cambridge: MIT Press.
Winfield, A. F. (2009). Foraging robots. In Encyclopedia of complexity and system science, Springer (pp. 3682–3700).
Yang, Y., Zhou, C., & Tian, Y. (2009). Swarm robots task allocation based on response threshold model. In 4th international conference on autonomous robots and agents, 2009. ICARA 2009, IEEE (pp. 171–176). doi:10.1109/ICARA.2000.4803959
Yared, R., Defago, X., & Wiesmann, M. (2007). Collision prevention using group communication for asynchronous cooperative mobile robots. In 21st international conference on advanced information networking and applications, 2007. AINA ’07, IEEE (pp. 244–249). doi:10.1109/AINA.2007.44
Yongming, Y., Xihui, C., Qingjun, L., & Yantao, T. (2010). Swarm robots task allocation based on local communication. In 2010 international conference on computer, mechatronics, control and electronic engineering (CMCE), IEEE (Vol. 5, pp. 415–418). doi:10.1109/CMCE.2010.5609944
Zhang G.-Y., Zeng J.-C. (2012). A discrete stochastic process for analysis of terrain coverage algorithm based on wasp swarm. In 2012 international conference on computing, measurement, control and sensor network (CMCSN), IEEE (pp. 191–194). doi:10.1109/CMCSN.2012.49
Acknowledgments
All real-robot experiments described in the research were conducted within the Swarm Robotics Group at BRL (Bristol Robotics Laboratory). This research was supported by “Program for Leading Graduate Schools” of the Ministry of Education, Culture, Sports, Science and Technology, Japan.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 1 (mov 80849 KB)
Rights and permissions
About this article

Cite this article
Castello, E., Yamamoto, T., Libera, F.D. et al. Adaptive foraging for simulated and real robotic swarms: the dynamical response threshold approach. Swarm Intell 10, 1–31 (2016). https://doi.org/10.1007/s11721-015-0117-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11721-015-0117-7