
Abstract
Purpose
The manner in which healthy humans interact with objects as they move them within the hand is essential for activities of everyday life. The present study aims to identify the most salient features of the complex interactions between the fingers of the hand and the object. Specifically, the study seeks to determine whether the force applied by a healthy person follows a natural trend throughout the movement, or if it varies from individual to individual. Results will potentially inform the design of therapies, surgeries, and the design of prosthetic and orthotic devices to restore function in patients with compromised hand function.
Methods
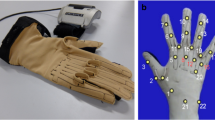
The joint angles of four healthy subjects were recorded by a magnetic motion tracking system along with the forces the hand was applying to an instrumented object. These were recorded as subjects moved the object from a pose with fingers outstretched toward the palm of the hand and back again. After the joint angles were extracted from the motion capture readings, principal component analysis was conducted on the joint angle-force space as well as the space consisting of the joint angles alone.
Results
Principal component analysis of the joint angle and force data revealed that the first two principal components explained over 90% of the variance. One of these principal components was associated with the curling motion of the fingers, and the other with the squeezing of the object. The curling motion was consistent from subject to subject, but the changes in gripping force over the course of the movement varied from individual to individual.
Conclusion
The study supports the notion that when conducting an in-hand manipulation of an object, the coupled motions of the fingers and the sequence of hand shapes follows a common trend across individuals. The force applied to the object, however, seems to be volitional on the part of the subject and does not seem to follow as a consequence of the hand movement.






Similar content being viewed by others


Data Availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request
Code Availability
Wolfram Mathematica Code used for data analysis will be provided upon reasonable request
Notes
Including PC 7, as the final principal component, always returns 100% of the variance
The measure of this is the 7th component, which was over 0.84 for all four subjects
Santello, Soechting, and Flanders’ PC1 would not be observed in our experiment as the fingers cannot abduct and adduct and still remain in contact with the marked locations on the object
References
Arimoto, S. (2004). Intelligent control of multi-fingered hands. Annual Reviews in Control, 28(1), 75–85. https://doi.org/10.1016/j.arcontrol.2003.12.001
Bullock, I. M., Borras, J., & Dollar, A. M. (2012). Assessing assumptions in kinematic hand models: A review. In Proceedings of the IEEE RAS and EMBS international conference on biomedical robotics and biomechatronics (pp. 139–146).
Craig, J. J. (2005). Introduction to robotics, mechanics and control (3rd ed.). Pearson Prentice-Hall.
Cutkosky, M. R., et al. (1989). On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Transactions on Robotics and Automation, 5(3), 269–279.
De Gregorio, M., & Santos, V. J. (2013). Precision grip responses to unexpected rotational perturbations scale with axis of rotation. Journal of Biomechanics, 46(6), 1098–103.
Dollar, A. M., & Howe, R. D. (2010). The highly adaptive SDM hand: Design and performance evaluation. The International Journal of Robotics Research, 29(5), 585–597.
Edwards, S. J., Buckland, D. J., & McCoy-Powlen, J. D. (2002). Developmental and functional hand grasps. Slack.
Ekvall S., & Kragic, D. (2005). Grasp recognition for programming by demonstration. In Proceedings of the 2005 IEEE international conference on robotics and automation (pp. 748–753). IEEE.
Faria, D. R., Lobo, J., & Dias, J. (2012). Identifying objects from hand configurations during in-hand exploration. In IEEE international conference on multisensor fusion and integration for intelligent systems (pp. 132–137).
Feix, T., Pawlik, R., Schmiedmayer, H.-B., Romero, J., & Kragic, D. (2009) A comprehensive grasp taxonomy. In Robotics, science and systems: Workshop on understanding the human hand for advancing robotic manipulation (Vol. 2, pp. 2–3). Seattle, WA, USA.
Hauser, K., Ng-Thow-Hing, V., & Gonzalez-Baños, H. (2010). Multi-modal motion planning for a humanoid robot manipulation task. In Robotics research (pp. 307–317). Springer.
Heumer, G., Amor, H. B., Weber, M., & Jung, B. (2007). Grasp recognition with uncalibrated data gloves-A comparison of classification methods. In 2007 IEEE virtual reality conference (pp. 19–26). IEEE.
Jarrassé, N., Kühne, M., Roach, N., Hussain, A., Balasubramanian, S., Burdet, E., & Roby-Brami, A. (2013). Analysis of grasping strategies and function in hemiparetic patients using an instrumented object. In IEEE International Conference on Rehabilitation Robotics, number June, 1–8
Kamakura, N., Matsuo, M., Ishii, H., Mitsuboshi, F., & Miura, Y. (1980). Patterns of static prehension in normal hands. American Journal of Occupational Therapy, 34(7), 437–445.
Kamper, D. G., Cruz, E. G., & Siegel, M. P. (2003). Stereotypical fingertip trajectories during grasp. Journal of Neurophysiology, 90(6), 3702–3710.
Kang, S. B., & Ikeuchi, K. (1997). Toward automatic robot instruction from perception-mapping human grasps to manipulator grasps. IEEE Transactions on Robotics and Automation, 13(1), 81–95.
Kondo, M., Ueda, J., & Ogasawara, T. (2008). Recognition of in-hand manipulation using contact state transition for multifingered robot hand control. Robotics and Autonomous Systems, 56(1), 66–81.
Kruger, A., Strauss, M., Marieta, M., & Nel, M. (2021). Assessment of in-hand manipulation by occupational therapists in paediatric practices in South Africa. South African Journal of Occupational Therapy, 51(2), 11–21. https://doi.org/10.17159/2310-3833/2021/vol52n2a3
Leveroni, S. R., & Salisbury, J. K. (1996). Cooperative control of multiple robots to manipulate objects. Sensor Fusion and Distributed Robotic Agents, 2905, 2–10.
Liu, H., Xie, X., Millar, M., Edmonds, M., Gao, F., Zhu, Y., Santos, V. J., Rothrock, B., & Zhu, S. C. (2017). A glove-based system for studying hand-object manipulation via joint pose and force sensing. In IEEE international conference on intelligent robots and systems (pp. 6617–6624), Vancouver, Canada. https://doi.org/10.1109/IROS.2017.8206575
Mason, M. T. (1986). Mechanics and planning of manipulator pushing operations. The International Journal of Robotics Research, 5(3), 53–71.
Okamura, A., Smaby, N., & Cutkosky, M. (2000). An overview of dexterous manipulation. Proceedings 2000 ICRA. Millennium conference. IEEE international conference on robotics and automation. symposia proceedings (Cat. No.00CH37065) (Vol. 1(October), pp. 255–262). https://doi.org/10.1109/ROBOT.2000.844067
Rahman, M. M., Mitobe, K., Suzuki, M., & Yoshimura, N. (2010). Analysis of finger movements of a pianist using magnetic motion capture system with six dimensional position sensors. Transactions of the Virtual Reality Society of Japan, 15(2), 243–250.
Roa, M. A., & Suárez, R. (2015). Grasp quality measures: review and performance. Autonomous Robots, 38(July 2014), 65–88.
Santello, M., & Soechting, J. F. (2000). Force synergies for multifingered grasping. Experimental Brain Research, 133(4), 457–467.
Santello, M., Flanders, M., & Soechting, J. F. (1998). Postural hand synergies for tool use. Journal of Neuroscience, 18(23), 10105–10115.
Schultz, J. A., & Rake, N. J. (2021). A four-tendon robotic finger with tendon transmission inspired by the human extensor mechanism. Bioinspiration and Biomimetics. https://doi.org/10.1088/1748-3190/abc6b5
Sturman, D., & Zeltzer, D. (1994). A survey of glove-based input. IEEE Computer Graphics and Applications, 14(1), 30–39.
Ueda, J., Kondo, M., & Ogasawara, T. (2010). The multifingered NAIST hand system for robot in-hand manipulation. Mechanism and Machine Theory, 45(2), 224–238.
Wang, Y., & Neff, M. (2013). Data-driven glove calibration for hand motion capture. In Proceedings - SCA. (2013). 12th ACM SIGGRAPH/Eurographics symposium on computer animation (pp. 15–24). https://doi.org/10.1145/2485895.2485901
Wimmer, R. (2010). Grasp sensing for human-computer interaction. In Proceedings of the fifth international conference on Tangible, embedded, and embodied interaction (pp. 221–228).
Yoshida, E., Poirier, M., Laumond, J.-P., Kanoun, O., Lamiraux, F., Alami, R., & Yokoi, K. (2010). Pivoting based manipulation by a humanoid robot. Autonomous Robots, 28(1), 77.
Zatsiorsky, V. M., Li, Z. M., & Latash, M. L. (1998). Coordinated force production in multi-finger tasks: Finger interaction and neural network modeling. Biological Cybernetics, 79(2), 139–150.
Funding
This research was not funded by any organization
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by DD. The first draft of the manuscript was written by JS and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflict of interest with this study
Ethical Approval
Approval was obtained from the Institutional Review Board of The University of Tulsa. The procedures used in this study adhere to the tenets of the Declaration of Helsinki.
Informed Consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Das, D., Schultz, J. Principal Component Analysis of Grasp Force and Pose During In-Hand Manipulation. J. Med. Biol. Eng. 42, 658–670 (2022). https://doi.org/10.1007/s40846-022-00748-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40846-022-00748-x