
Abstract
Purpose
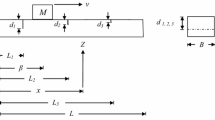
This work aims to investigate a cracked cantilever beam subjected to a moving point force using the Discrete Element Method (DEM).
Contribution and Method
A novel approach to mathematically include a moving force in discrete element formulation of a cracked beam is the main contribution of this paper. The local reduction in the stiffness of the cantilever beam due to the presence of a crack has been accounted for by a popularly used result from fracture mechanics. Hence, the present work provides an alternative approach to numerically evaluate the forced vibration of cracked beams under the application of a moving point force.
Conclusion
The methodology has been verified by comparing some of the results obtained here to those obtained using an already published analytical method. In the end, the effects of crack length, crack location, and force-velocity on the dynamic behavior of the cracked beam are studied using the proposed methodology. The proposed method can provide an effective alternative for the analysis of cracked beams subjected to a moving point force.












Similar content being viewed by others

References
Amezquita-Sanchez JP, Adeli H (2016) Signal processing techniques for vibration-based health monitoring of smart structures. Arch Comput Methods Eng 23(1):1–15
Patel SS, Chourasia A, Bhattacharyya SKPSK, Parashar J (2018) A study on efficacy of wavelet transform for damage identification in reinforced concrete buildings. J Vib Eng Technol 6(2):127–138
Chatterjee A, Vaidya T (2019) Experimental investigations: dynamic analysis of a beam under the moving mass to characterize the crack presence. J Vib Eng Technol 7(3):217–226
Farrar CR, Worden K (2013) Structural health monitoring: a machine learning perspective. Wiley, Chichester
Muscolino G, Santoro R (2019) Dynamics of multiple cracked prismatic beams with uncertain-but-bounded depths under deterministic and stochastic loads. J Sound Vib 443:717–731
Avramov K, Malyshev S (2019) Bifurcations and chaotic forced vibrations of cantilever beams with breathing cracks. Eng Fract Mech 214:289–303
Khnaijar A, Benamar R (2017) A discrete model for nonlinear vibrations of a simply supported cracked beams resting on elastic foundations. Diagnostyka 18(3):39–46
Okamura H, Liu HW, Chu C-S (1969) A cracked column under compression. Eng Fract Mech 1(3):547–564
Ostachowicz WM, Krawczuk M (1991) Analysis of the effect of cracks on the natural frequencies of a cantilever. J Sound Vib 150(2):191–201
Narkis Y (1994) Identification of crack location in vibrating simply supported beams. J Sound Vib 172(4):549–558
Lin JD, Chang HP, Wu SC (2002) Beam vibrations with an arbitrary number of cracks. J Sound Vib 258(5):987–999
Christides S, Barr ADS (1983) One-dimensional theory of cracked Bernoulli-Euler beams. Int J Mech Sci 26(11):639–648
Chondros TG et al (1998) A continuous cracked beam vibration theory. J Sound Vib 215(1):17–34
Chondros TG et al (2001) Vibration of a beam with a breathing crack. J Sound Vib 239(1):57–67
Nandi S, Neogy A (2002) Modelling of a beam with a breathing edge crack and some observations for crack detection. J Vib Control 8(5):673–693
Bouboulas AS, Anifantis NK (2010) Finite element modeling of a vibrating beam with a breathing crack: observations on crack detection. Struct Heal Monit 10(2):131–145
Neves AC, Simões FMF, Pinto A (2016) Vibrations of cracked beams: discrete mass and stiffness models. Comput Struct 168:68–77
Neild SA, McFadden PD, Williams MS (2001) A discrete model of a vibrating beam using a time-stepping approach. J Sound Vib 239(1):99–121
Nikolic A, Salinic S (2020) Free vibration analysis of cracked beams by using rigid segment method. Appl Math Model 84:158–172
Friswell MI, Penny JET (2002) Crack modeling for structural health monitoring. Struct Heal Monit 1(2):139–148
Wang Y, Zhu X, Lou Z (2019) Dynamic response of beams under moving loads with finite deformation. Nonlinear Dyn 98(1):167–184
Tao C, Fu Y, Dai T (2017) Dynamic analysis for cracked fiber-metal laminated beams carrying moving loads and its application for wavelet based crack detection. Compos Struct 159:463–470
Museros P, Moliner E, Martinez-Rodrigo MD (2013) Free vibrations of simply-supported beam bridges under moving loads: maximum resonance, cancellation and resonant vertical acceleration. J Sound Vib 332:326–345
Lee HP, Ng TY (1994) Dynamic response of a cracked beam subject to a moving load. Acta Mech 106(3–4):221–230
à HL, Chang S (2006) Forced responses of cracked cantilever beams subjected to a concentrated moving load. Int J Mech Sci 48(12):1456–1463
Shafiei M, Khaji N (2011) Analytical solutions for free and forced vibrations of a multiple cracked Timoshenko beam subject. Acta Mech 97:79–97
Rieker JR, Trethewey MW (1999) Finite element analysis of an elastic beam Structure subjected to a moving distributed mass train. Mech Syst Signal Process 13(1):31–51
Sarvestan V, Reza H, Ghayour M, Mokhtari A (2015) Spectral finite element for vibration analysis of cracked viscoelastic Euler – Bernoulli beam subjected to moving load. Acta Mech 226(12):4259–4280
Song Y, Kim T, Lee U (2016) Vibration of a beam subjected to a moving force: frequency-domain spectral element modeling and analysis. Int J Mech Sci 113:162–174
Chakraborty NJG (2020) Parametric resonance in cantilever beam with feedback—induced base excitation. J Vib Eng Technol, pp 1–11
Rizos PF, Aspragathos N, Dimarogonas AD (1990) Identification magnitude the of crack location modes and from in a cantilever. J Sound Vib 138(3):381–388
Lin H-P, Chen C-K (2003) Accelerated convergence study of the eigenvalue problems with limited continuities. Jpn J Appl Phys 42(1):1348–1354
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
A. Description of the Analytical Method used in this Work for Comparison with the DEM
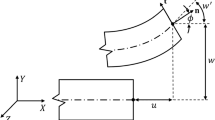
The analytical method used in this work for comparison with the proposed numerical approach was presented by Lin et al. [25]. For the beam considered in Sect. 2, the analytical formulation will be presented in this section. The governing equation of the beam is derived by considering the beam to have two parts connected by a rotation spring at the crack location. The partial differential equations which model the vibration of the beam can be written as:
where \(x_{0} = 0\), \(x_{1} = L_{c}\), \(x_{2} = L\), \(y_{1}\) and \(y_{2}\) are displacements in left and right sides of the crack, respectively, \(I\) is the area moment of inertia about the centroidal axis of the beam cross section which is perpendicular to the \(x\) axis and \(A\) is the area of cross section. And the boundary conditions for the cantilever beam are given below [25]:
The continuity of displacement, shear force and bending moment at crack location can be written mathematically as [25]:
where \(L_{c}^{ - }\) and \(L_{c}^{ + }\) represent the location infinitesimally close to the crack from left and from right, respectively. Since the bending stiffness at the crack location has been reduced, there exists a discontinuity in the slope across the crack.
where \(\psi = 6*\pi \left( \frac{a}{d} \right)^{2} \xi \left( \frac{a}{d} \right)\left( \frac{d}{L} \right)\) is known as non-dimensional crack sectional flexibility and for a single-sided open crack:
Eigensolutions of the Beam
To find the eigensolutions, \(F_{0} \delta \left( {x - vt} \right)\) has to be set to zero in Eqs. (18). After that assuming the solutions of the form \(y_{i} = w_{i} \left( x \right)e^{j\omega t}\), one gets the eigenvalue problem as:
where
The compatibility requirements from Eqs. (23) to (26) lead to:
And the boundary conditions from Eqs. (19) to (22) lead to:
The general solutions of Eq. (27) can be written as [25]:
Application of compatibility conditions gives the relationship between the arbitrary constants of each of the segments as:
The elements of matrix \(\left[ T \right]\) can be found in the appendix of [11]. Satisfaction of boundary conditions (33) and (34) gives:
And satisfying boundary conditions from Eqs. (35) and (36) and using Eq. (38) gives:
where \(\left[ Q \right]_{2 \times 4} = \left[ {\begin{array}{*{20}c} { - \sin \lambda \left( {L - L_{c} } \right)} & { - \cos \lambda \left( {L - L_{c} } \right)} & {\sinh \lambda \left( {L - L_{c} } \right)} & {\cosh \lambda \left( {L - L_{c} } \right)} \\ { - \cos \lambda \left( {L - L_{c} } \right)} & {\sin \lambda \left( {L - L_{c} } \right)} & {\cosh \lambda \left( {L - L_{c} } \right)} & {\sinh \lambda \left( {L - L_{c} } \right)} \\ \end{array} } \right].\) Eqs. (41) and (42) can be combined to get:
For non-trivial solutions of \(\left( {A_{1} ,B_{1} ,C_{1} ,D_{1} } \right)\),\(\det \left( {\left[ {\begin{array}{*{20}c} {\left[ Q \right]_{2 \times 4} \left[ T \right]_{4 \times 4} } \\ {\left[ P \right]_{2 \times 4} } \\ \end{array} } \right]} \right) = 0\), This provides the characteristic Eq. (42):
where \(\lambda_{n}\) denote the nth eigenvalue of the system. To calculate corresponding \(w_{n} \left( x \right)\) (i.e., the nth eigenfunction) first the constants \(\left( {A_{1} ,B_{1} ,C_{1} ,D_{1} } \right)\) are calculated by substituting \(\lambda_{n}\) in Eq. (41) and Eq. (38) is used to find the arbitrary constants \(\left( {A_{2} ,B_{2} ,C_{2} ,D_{2} } \right)\). These sets of constants for different values of \(\lambda_{n}\) can be substituted in Eqs. (37) to find the required eigenfunctions.
Forced Vibration Response of the Beam
The forced response of the system can now be determined by solving the Eq. (18) using the modal expansion theory. Equation (18) has been rewritten here:
Expressing the forced response \(y\left( {x,t} \right)\) as:
where \(w_{j} \left( x \right)\) are the eigenfunctions of the cracked beam and \(q_{j} \left( t \right)\) are the generalized coordinates and \(N_{m}\) is the number of eigenfunctions used for approximating the response.
Now substituting Eq. (43) in Eq. (18), taking the inner product with \(w_{k} \left( x \right)\) and using the orthogonality property of eigenfunctions lead to:
Rearranging Eq. (44) with integral on the right hand side being simplified leads to:
Ordinary differential Eq. (45) can be solved for \(q_{k}\) by using the Duhamel’s integral method and the solution can be written as:
where the eigenfunctions \(w_{k} \left( {vt} \right)\) can be divided into two parts from Eq. (27) and can be written as:
Therefore, \(q_{k} \left( t \right)\) can be determined and used in Eq. (43) along with \(w_{k} \left( x \right)\) to get the final response \(y\left( {x,t} \right)\).
Rights and permissions
About this article

Cite this article
Agrawal, A.K., Chakraborty, G. Dynamics of a Cracked Cantilever Beam Subjected to a Moving Point Force Using Discrete Element Method. J. Vib. Eng. Technol. 9, 803–815 (2021). https://doi.org/10.1007/s42417-020-00265-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-020-00265-8