
Abstract
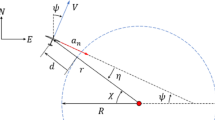
This paper presents a guidance method to enable a fixed-wing UAV to rendezvous with a reference point that moves on a circular path. The guidance law creates a lateral acceleration command based on the phase difference from the moving point and the side-bearing angle with respect to the center of the circle. The stability of the guidance law and the effect of velocity control are provided with linear analyses. The feasibility and performance of the proposed method are demonstrated through simulations and actual flight tests.
















Similar content being viewed by others


References
Sun L, Beard RW, Colton MB (2010) Motion planning and control for mothership-cable-drogue systems in aerial recovery of micro air vehicles. Am Control Conf (ACC). https://doi.org/10.1109/ACC.2010.5531313
Fravolini ML, Ficola A, Campa G, Napolitano MR, Seanor B (2004) Modeling and control issues for autonomous aerial refueling for UAVs using a probe drogue refueling system. Aerosp Sci Technol 8:611–618. https://doi.org/10.1016/j.ast.2004.06.006
Nichols JW, Sun L, Beard RW, McLain T (2014) Aerial rendezvous of small unmanned aircraft using a passive towed cable system. J Guid Control Dynam 37:1131–1142. https://doi.org/10.2514/1.62220
Wilson D, Goktogan A, Sukkarieh S (2015) Guidance and navigation for UAV airborne docking. In: Proceedings of robotics: Science and systems. Rome. https://doi.org/10.13140/RG.2.1.1496.8162
Jourdan D (2003) Trajectory design and vehicle guidance for a mid-air rendezvous between two autonomous aircraft. Master dissertation, MIT, Department of Aero/Astro. http://hdl.handle.net/1721.1/44514
Thakar S, Ratnoo A (2016) Rendezvous guidance laws for aerial recovery using mothership-cable-drogue system. IFAC-PapersOnLine 49:24–29. https://doi.org/10.1016/j.ifacol.2016.03.023
Shneydor NA (1998) Missile guidance and pursuit: kinematics, dynamics and control. Elsevier, Amsterdam
Ryoo CK, Cho H, Tahk MJ (2005) Optimal guidance laws with terminal impact angle constraint. J Guid Control Dynam 28:724–732. https://doi.org/10.2514/1.8392
Ratnoo A, Hayoun SY, Granot A, Shima T (2014) Path following using trajectory shaping guidance. J Guid Control Dynam 38:106–116. https://doi.org/10.2514/1.G000300
Shaferman V, Shima T (2008) Linear quadratic guidance laws for imposing a terminal intercept angle. J Guid Control Dynam 31(5):1400–1412. https://doi.org/10.2514/1.32836
Shima T (2011) Intercept-angle guidance. J Guid Control Dynam 34(2):484–492. https://doi.org/10.2514/1.51026
Ochi Y, Kominami T (2005) Flight control for automatic aerial refueling via PNG and LOS angle control. In: AIAA guidance, navigation and control conference and exhibit. AIAA Paper 2005-6268. https://doi.org/10.2514/6.2005-6268
Wang J, Patel VV, Cao C, Hovakimyan N, Lavretsky E (2008) Novel L1 adaptive control methodology for aerial refueling with guaranteed transient performance. J Guid Control Dynam 31(1):182–193. https://doi.org/10.2514/1.31199
Tsukerman A, Weiss M, Shima T, Lobl D, Holzapfel F (2018) Optimal rendezvous guidance laws with application to civil autonomous aerial refueling. J Guid Control Dynam 41(5):1167–1174. https://doi.org/10.2514/1.G003154
Park S (2016) Circling over a target with relative side bearing. J Guid Control Dynam 39(6):1450–1456. https://doi.org/10.2514/1.G001421
Dubins L (1957) On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. Am J Math 79(3):497–516. https://doi.org/10.2307/2372560
Ren W, Beard R (2004) Trajectory tracking for unmanned air vehicles with velocity and heading rate constraints. IEEE Trans Control Syst Technol 12(5):706–716. https://doi.org/10.1109/TCST.2004.826956
Park S (2017) Wind and airspeed error estimation with GPS and pitot-static system for small UAV. Int J Aeronaut Space Sci 18(2):344–351. https://doi.org/10.5139/IJASS.2017.18.2.344
Acknowledgements
This work was supported by Technology Innovation Program (20003471, Source Technology Development of a Mid-Air Separation Reintegration System for Fixed-wing Parent and Child UAVs) funded by the Ministry of Trade, Industry & Energy (MOTIE, Korea)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
This section describes how the artificial reference point was generated for the flight test described in Sect. 5. The reference point moves along a circular path. It should be created such that a following UAV can fly along with it. Also, considering the aerial docking scenario, the reference point is defined somewhere behind the leading UAV, which is also affected by the wind. Therefore, in this work, the artificial reference point is generated based on the UAV flight speed and the wind condition as well.
Figure

Reference point generation
17 shows a diagram to explain the details on how to generate the moving reference point on a circular path considering the characteristics of UAV behavior in the presence of wind.
Considering the reference point as a virtual aircraft, it is subjected to the vector relation
where \({V}_{T}\) is the inertial velocity of the reference point, \({V}_{{{\text{wind}}}}\) is the wind velocity, and \({V}_{T_{{{\text{air}}}}}\) the relative velocity of the reference point with respect to the wind. The wind velocity is estimated onboard the flight control computer [18].
The magnitude of \({V}_{T_{{{\text{air}}}}}\) should be chosen considering the UAV flight speed. With the given radius and the center of the circle, the instantaneous position of the reference point is determined by
where \(\lambda_{T}\) is the phase angle from the reference north axis. The angular rate is governed by
where (+) sign is for the clockwise rotation, and (–) sign is for the counter-clockwise rotation. From this phase angle, \(\lambda_{T}\) is numerically updated by
where \(\Delta t\) is the incremental time interval.
The remaining task is to determine \(V_{T}\). From the vector relation, we have
Eliminating \(\psi_{T}\) leads to the following expression
It is noted that \(V_{T} = V_{{T}_{\text{air}}}\) is obtained for no wind conditions, as expected. Finally, from the diagram \(\psi_{{T}_{c}}\) is determined by
Rights and permissions
About this article

Cite this article
Park, S. Rendezvous Guidance on Circular Path for Fixed-Wing UAV. Int. J. Aeronaut. Space Sci. 22, 129–139 (2021). https://doi.org/10.1007/s42405-020-00281-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42405-020-00281-8