
Abstract
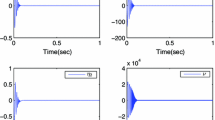
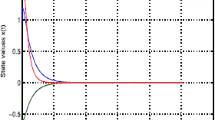
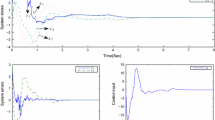
This paper discusses the problem of global adaptive finite-time control for a class of stochastic nonlinear systems with parametric uncertainty. Under the assumption that the drift and diffusion terms satisfy lower-triangular growth conditions, a continuous adaptive controller is designed based on the adding one power integrator technique and parameter separation principle. By constructing an adaptive law to counteract the effects of uncertain parameters, it is proved that system states can be regulated to the origin almost surely in a finite time. Two simulation examples are given to demonstrate the effectiveness of the proposed control procedure.


Similar content being viewed by others
References
W. Ai, J. Zhai, S. Fei, Global finite-time stabilization for a class of stochastic nonlinear systems by dynamic state feedback. Kybernetika 49(4), 590–600 (2013)
S.P. Bhat, D.S. Bernstein, Finite-time stability of homogeneous systems. Proc. Am. Control Conf. 4, 2513–2514 (1997)
S.P. Bhat, D.S. Bernstein, Finite-time stability of continuous autonomous systems. SIAM J. Control Optim. 38(3), 751–766 (2000)
H. Deng, M. Krstić, Stochastic nonlinear stabilization I: a backstepping design. Syst. Control Lett. 32(3), 143–150 (1997)
H. Deng, M. Krstic, R.J. Williams, Stabilization of stochastic nonlinear systems driven by noise of unknown covariance. IEEE Trans. Autom. Control 46(8), 1237–1253 (2001)
S. Ding, C. Qian, S. Li, Q. Li, Global stabilization of a class of upper-triangular systems with unbounded or uncontrollable linearizations. Int. J. Robust Nonlinear Control 21(3), 271–294 (2011)
P. Florchinger, Lyapunov-like techniques for stochastic stability. SIAM J. Control Optim. 33(4), 1151–1169 (1995)
F. Gao, F. Yuan, Adaptive stabilization of stochastic nonholonomic systems with nonlinear parameterization. Appl. Math. Comput. 219(16), 8676–8686 (2013)
V.T. Haimo, Finite time controllers. SIAM J. Control Optim. 24(4), 760–770 (1986)
Y. Hong, J. Wang, D. Cheng, Adaptive finite-time control of nonlinear systems with parametric uncertainty. IEEE Trans. Autom. Control 51(5), 858–862 (2006)
X. Huang, W. Lin, B. Yang, Global finite-time stabilization of a class of uncertain nonlinear systems. Automatica 41(5), 881–888 (2005)
H. Ji, Z. Chen, H. Xi, Adaptive stabilization for stochastic parametric-strict-feedback systems with wiener noises of unknown covariance. Int. J. Systems Sci. 34(2), 123–127 (2003)
H. Ji, H. Xi, Adaptive output-feedback tracking of stochastic nonlinear systems. IEEE Trans. Autom. Control 51(2), 355–360 (2006)
R. Khasminskii, Stochastic Stability of Differential Equations (S&N International Publisher, Rockville, 1980)
S. Khoo, J. Yin, Z. Man, X. Yu, Finite-time stabilization of stochastic nonlinear systems in strict-feedback form. Automatica 49(5), 1403–1410 (2013)
M. Krstić, H. Deng, Stabilization of Nonlinear Uncertain Systems (Springer, London, 1998)
M. Krstić, I. Kanellakopoulos, P.V. Kokotović, Nonlinear and Adaptive Control Design (Wiley, New York, 1995)
W. Li, X. Liu, S. Zhang, Further results on adaptive state-feedback stabilization for stochastic high-order nonlinear systems. Automatica 48(8), 1667–1675 (2012)
W. Lin, C. Qian, Adaptive control of nonlinearly parameterized systems: a nonsmooth feedback framework. IEEE Trans. Autom. Control 47(5), 757–774 (2002)
S. Liu, J. Zhang, Output-feedback control of a class of stochastic nonlinear systems with linearly bounded unmeasurable states. Int. J. Robust Nonlinear Control 18(6), 665–687 (2008)
X. Liu, D.W. Ho, W. Yu, J. Cao, A new switching design to finite-time stabilization of nonlinear systems with applications to neural networks. Neural Netw. 57, 94–102 (2014)
X. Liu, J.H. Park, N. Jiang, J. Cao, Nonsmooth finite-time stabilization of neural networks with discontinuous activations. Neural Netw. 52, 25–32 (2014)
A. Skorokhod, Studies in the Theory of Random Processes (Addison-Wesley, Boston, 1965)
J. Tian, X.J. Xie, Adaptive state-feedback stabilization for high-order stochastic non-linear systems with uncertain control coefficients. Int. J. Control 80(9), 1503–1516 (2007)
J. Yin, S. Khoo, Z. Man, X. Yu, Finite-time stability and instability of stochastic nonlinear systems. Automatica 47(12), 2671–2677 (2011)
S. Yu, X. Yu, B. Shirinzadeh, Z. Man, Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 41(11), 1957–1964 (2005)
W. Zha, J. Zhai, W. Ai, S. Fei, Finite-time state-feedback control for a class of stochastic high-order nonlinear systems. Int. J. Comput. Math. 92(2), 643–660 (2015)
W. Zha, J. Zhai, S. Fei, Output feedback control for a class of stochastic high-order nonlinear systems with time-varying delays. Int. J. Robust Nonlinear Control 24(16), 2243–2260 (2014)
W. Zha, J. Zhai, S. Fei, Y. Wang, Finite-time stabilization for a class of stochastic nonlinear systems via output feedback. ISA Trans. 53(3), 709–716 (2014)
J. Zhai, Decentralised output-feedback control for a class of stochastic non-linear systems using homogeneous domination approach. IET Control Theory Appl. 7(8), 1098–1109 (2013)
J. Zhai, Finite-time output feedback stabilization for stochastic high-order nonlinear systems. Circuits Syst. Signal Process. 33(12), 3809–3837 (2014)
J. Zhai, Global finite-time output feedback stabilisation for a class of uncertain non-triangular nonlinear systems. Int. J. Systems Sci. 45(3), 637–646 (2014)
X. Zhang, G. Feng, Y. Sun, Finite-time stabilization by state feedback control for a class of time-varying nonlinear systems. Automatica 48(3), 499–504 (2012)
Acknowledgments
This work was supported in part by National Natural Science Foundation of China (61473082, 61104068, 61273119), Scientific Innovation Research of College Graduates in Jiangsu Province (KYLX_0134), Fundamental Research Funds for the Central Universities (2242013R30006), and Six Talents Peaks Program of Jiangsu Province (2014-DZXX-003) and PAPD.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
For convenience, some generic functions \(\beta _i(\bar{x}_i,\hat{\varTheta })\), \(i=1,\ldots ,n\), are used throughout the paper to stand for any nonnegative smooth functions with respect to their variables and may be implicitly changed in different places.
Proof of Proposition 1
The estimate of \(|\partial (x_k^{*1/r_k})/\partial x_i|\) can be done by an inductive argument. Note that
Assume that, for \(i=1,\ldots ,k-2\),
Therefore, it can be verified that
which implies that (41) also holds for the \(k\)th virtual controller. According to the definition of \(\xi _i\), \(i=1,\ldots ,k\), and Lemma 4, one gets
which leads to \(\forall i=1,\ldots ,k-1\)
Clearly, Proposition 1 follows from (45). \(\square \)
Proof of Proposition 2
Under Assumption 1, the drift terms can be estimated as
According to Lemmas 4 and 5, one has \(\forall i=1,\ldots ,k\)
under which Proposition 2 holds naturally. \(\square \)
Proof of Proposition 3
Based on Assumption 1, one has \(\forall i=1,\ldots ,k\)
Similar to the proof in Proposition 1, the estimate of \(|\partial ^2(x_k^{*\mu /r_k})/\partial x_i^2|\) can also be done inductively. Specifically, for \(i=1,\ldots ,k-1\)
Combining (48) and (49), it yields that for \(i=1,\ldots ,k-1\),
where \(\bar{h}_{k3}(\cdot )\ge 0\) is a smooth function of \(x_1,\ldots ,x_{k-1},\hat{\varTheta }\). Moreover, for a nonnegative smooth function \(\tilde{h}_{k3}(\bar{x}_k,\hat{\varTheta })\)
It is clear that Proposition 3 follows from (50) and (51), by letting \(h_{k3}(\cdot )\!=(k\!-1)\bar{h}_{k3}(\cdot )+\tilde{h}_{k3}(\cdot )\). \(\square \)
Proof of Proposition 4
In a similar way, for \(i,j=1,\ldots ,k-1\) and \(i\ne j\),
under which
where \(\bar{h}_{k4}(\cdot )\) is a nonnegative smooth function. For \(i=k\) and \(j\ne k\), there exists a smooth function \(\tilde{h}_{k4}(\bar{x}_k,\hat{\varTheta })\) satisfying
which leads to Proposition 4 by combining it with (53). \(\square \)
Proof of Proposition 5
Using (15) and the definition of \(\sigma _k\), one can get
for a nonnegative smooth function \(h_{k5}(\cdot )\). In addition, it is easy to obtain that
By choosing \(h_{k6}(\bar{x}_k,\hat{\varTheta })=\sqrt{1+(\sum _{i=1}^{k-1}\frac{\partial W_i}{\partial \hat{\varTheta }}\delta _k(\cdot ))^2}\), we complete the proof. \(\square \)
Rights and permissions
About this article

Cite this article
Zha, W., Zhai, J. & Fei, S. Global Adaptive Finite-Time Control for Stochastic Nonlinear Systems via State Feedback. Circuits Syst Signal Process 34, 3789–3809 (2015). https://doi.org/10.1007/s00034-015-0043-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-015-0043-3