
Abstract
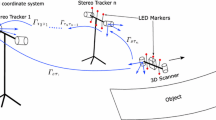
This paper presents a three-dimensional (3-D) measurement method of large-scale objects by integrating a 3-D scanner and a stereo tracker. To measure a large-scale object, some high-brightness light-emitting diode (LED) lights are rigidly connected to the 3-D scanner. During measurement, the stereo tracker remains stationary, and the 3-D scanner is moved to measure partial sections of a large object. Meanwhile, the LED lights are tracked by the stereo tracker to compute the poses of the 3-D scanner for aligning partial sections. The performance and effectiveness are evaluated by experiments.











Similar content being viewed by others

References
Komodakis, N., Tziritas, G.: Real-time exploration and photorealistic reconstruction of large natural environments. Vis. Comput. 25(2), 117–137 (2009)
Zhu, C., Leow, W.K.: Textured mesh surface reconstruction of large buildings with multi-view stereo. Vis. Comput. 29(6–8), 609–615 (2013)
Shi, J., Zou, D., Bai, S., Qian, Q., Pang, L.: Reconstruction of dense three-dimensional shapes for outdoor scenes from an image sequence. Opt. Eng. 52(12), 123104–123104 (2013)
Agarwal, S., Furukawa, Y., Snavely, N., Simon, I., Curless, B., Seitz, S.M., Szeliski, R.: Building rome in a day. Commun. ACM 54(10), 105–112 (2011)
Furukawa, Y., Curless, B., Seitz, S.M., Szeliski, R.: Towards internet-scale multi-view stereo. In: Computer vision and pattern recognition (CVPR), 2010 IEEE conference on, IEEE, pp. 1434–1441 (2010)
Shan, Q., Adams, R., Curless, B., Furukawa, Y., Seitz, S.M.: The visual turing test for scene reconstruction. In: 3DTV-conference, 2013 international conference on, IEEE, pp. 25–32 (2013)
Kurazume, R., Tobata, Y., Iwashita, Y., Hasegawa, T.: 3d laser measurement system for large scale architectures using multiple mobile robots. In: 3-D digital imaging and modeling, 2007. 3DIM’07. 6th international conference on, IEEE, pp. 91–98 (2007)
Shim, H., Adelsberger, R., Kim, J.D., Rhee, S.-M., Rhee, T., Sim, J.-Y., Gross, M., Kim, C.: Time-of-flight sensor and color camera calibration for multi-view acquisition. Vis. Comput. 28(12), 1139–1151 (2012)
Iddan, G., Yahav, G.: Three-dimensional imaging in the studio and elsewhere. In: Photonics West 2001-electronic imaging, international society for optics and photonics, pp. 48–55 (2001)
Yahav, G., Iddan, G., Mandelboum, D.: 3d imaging camera for gaming application. In: Consumer electronics, 2007. ICCE 2007. Digest of technical papers. International conference on, IEEE, pp. 1–2 (2007)
Schuon, S., Theobalt, C., Davis, J., Thrun, S.: Lidarboost: depth superresolution for tof 3d shape scanning. In: Computer vision and pattern recognition, 2009. CVPR 2009. IEEE conference on, IEEE, pp. 343–350 (2009)
Cui, Y., Schuon, S., Chan, D., Thrun, S., Theobalt, C.: 3d shape scanning with a time-of-flight camera. In: Computer vision and pattern recognition (CVPR), 2010 IEEE conference on, IEEE, pp. 1173–1180 (2010)
Song, X., Zhong, F., Wang, Y., Qin, X.: Estimation of kinect depth confidence through self-training. Vis. Comput. 30(6–8), 855–865 (2014)
Salvi, J., Fernandez, S., Pribanic, T., Llado, X.: A state of the art in structured light patterns for surface profilometry. Pattern Recognit 43(8), 2666–2680 (2010)
Zhang, S.: Recent progresses on real-time 3d shape measurement using digital fringe projection techniques. Opt. Lasers Eng. 48(2), 149–158 (2010)
Geng, J.: Structured-light 3d surface imaging: a tutorial. Adv. Opt. Photonics 3(2), 128–160 (2011)
Zhang, Z.: Review of single-shot 3d shape measurement by phase calculation-based fringe projection techniques. Opt. Lasers Eng. 50(8), 1097–1106 (2012)
Newcombe, R.A., Davison, A.J., Izadi, S., Kohli, P., Hilliges, O., Shotton, J., Molyneaux, D., Hodges, S., Kim, D., Fitzgibbon, A.: Kinectfusion: real-time dense surface mapping and tracking. In: Mixed and augmented reality (ISMAR), 2011 10th IEEE international symposium on, IEEE, pp. 127–136 (2011)
Izadi, S., Kim, D., Hilliges, O., Molyneaux, D., Newcombe, R., Kohli, P., Shotton, J., Hodges, S., Freeman, D., Davison, A., et al.: Kinectfusion: real-time 3d reconstruction and interaction using a moving depth camera. In: Proceedings of the 24th annual ACM symposium on user interface software and technology, ACM, pp. 559–568 (2011)
Barone, S., Paoli, A., Viviano, A.: Razionale, shape measurement by a multi-view methodology based on the remote tracking of a 3d optical scanner. Opt. Lasers Eng. 50(3), 380–390 (2012)
Paoli, A., Razionale, A.V.: Large yacht hull measurement by integrating optical scanning with mechanical tracking-based methodologies. Robotics Comput.-Integr. Manuf. 28(5), 592–601 (2012)
Barone, S., Paoli, A., Razionale, A.V.: Three-dimensional point cloud alignment detecting fiducial markers by structured light stereo imaging. Mach. Vis. Appl. 23(2), 217–229 (2012)
Breitenstein, M.D., Reichlin, F., Leibe, B., Koller-Meier, E., Van Gool, L.: Robust tracking-by-detection using a detector confidence particle filter. In: Computer vision, 2009 IEEE 12th international conference on, IEEE, pp. 1515–1522 (2009)
Lucas, B.D., Kanade, T., et al.: An iterative image registration technique with an application to stereo vision. IJCAI 81, 674–679 (1981)
Tomasi, C., Kanade, T.: Detection and Tracking of Point Features. School of Computer Science, Carnegie Mellon University, Pittsburgh (1991)
Harris, C., Stephens, M.: A combined corner and edge detector. Alvey vision conference, vol. 15, p. 50. UK, Manchester (1988)
Harris, C., Stephens, M.: A combined corner and edge detector. In: Alvey vision conference, vol. 15. Manchester, UK (1988)
Lowe, D.: Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 60(2), 91–110 (2004)
Acknowledgments
This work is supported by General Financial Grant from the China Postdoctoral Science Foundation No. 2014M560417; the National Natural Science Foundation of China Nos. 61272219, 61100110, 61321491; the National High Technology Research and Development Program of China No. 2007AA01Z334; the Key Projects Innovation Fund of State Key Laboratory No. ZZKT2013A12; the Program for New Century Excellent Talents in University of China No. NCET-04-04605; the Graduate Training Innovative Projects Foundation of Jiangsu Province No. CXLX13 050; the Science and Technology Program of Jiangsu Province Nos. BE2010072, BE2011058, BY2012190.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Shi, J., Sun, Z. Large-scale three-dimensional measurement based on LED marker tracking. Vis Comput 32, 179–190 (2016). https://doi.org/10.1007/s00371-015-1063-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00371-015-1063-5