
Abstract
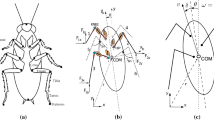
We develop a simple model for insect locomotion in the horizontal (ground) plane. As in earlier work by Seipel et al. (Biol Cybern 91(0):76–90, 2004) we employ six actuated legs that also contain passive springs, but the legs, with “hip” and ‘knee’ joints, better represent insect morphology. Actuation is provided via preferred angle inputs at each joint, corresponding to zero torques in the hip and knee springs. The inputs are determined from estimates of foot forces in the cockroach Blaberus discoidalis via an inverse problem. The head–thorax–body is modeled as a single rigid body, and leg masses, inertia and joint dissipation are ignored. The resulting three degree-of-freedom dynamical system, subject to feedforward joint inputs, exhibits stable periodic gaits that compare well with observations over the insect’s typical speed range. The model’s response to impulsive perturbations also matches that of freely-running cockroaches (Jindrich and Full, J Exp Biol 205:2803–2823, 2002), and stability is maintained in the face of random foot touchdowns representative of real insects. We believe that this model will allow incorporation of realistic muscle models driven by a central pattern generator in place of the joint actuators, and that it will ultimately permit the study of proprioceptive feedback pathways involving leg force and joint angle sensing.
Similar content being viewed by others


References
Ahn A and Full R (2002). A motor and a brake: two leg extensor muscles acting at the same joint manage energy differently in a running insect. J Exp Biol 205: 379–389
Altendorfer R, Moore N, Komsuoglu H, Buehler M, Brown HB Jr, McMordie D, Saranli U, Full R and Koditschek D (2001). RHex: a biologically inspired hexapod runner. Auton Robots 11: 207–213
Brown I and Loeb G (2000). A reductionist approach to creating and using neuromusculoskeletal movement. In: Winters, M and Crago, E (eds) Biomechanics and neural control of movement, pp 148–163. Springer, Heidelberg
Brown I, Scott S and Loeb G (1995). Preflexes—programmable high-gain zero-delay intrinsic responses of perturbed musculoskeletal systems. Soc Neurosci Abstr 21: 562.9
Delcomyn F (2004). Insect walking and robotics. Annu Rev Entomol 149: 51–70
Dudek D (2006) Passive mechanical properties of the exoskeleton simplify the control of rapid running in the cockroach Blaberus discoidalis. Ph.D. thesis, University of California, Berkeley
Dudek D and Full R (2006). Passive mechanical properties of legs from running insects. J Exp Biol 209: 1502–1515
Full R and Ahn A (1995). Static forces and moments generated in the insect leg: comparison of a three-dimensional musculo-skeletal computer model with experimental measurements. J Exp Biol 198: 1285–1298
Full R and Koditschek D (1999). Templates and anchors: neuromechanical hypothesis of legged locomotion on land. J Exp Biol 202: 3325–3332
Full R and Tu M (1990). Mechanics of six-legged runners. J Exp Biol 148: 129–146
Full R and Tu M (1991). Mechanics of a rapid running insect: two-, four- and six-legged locomotion. J Exp Biol 156: 215–231
Full R, Blickhan R and Ting L (1991). Leg design in hexapedal runners. J Exp Biol 158: 369–390
Full R, Stokes D, Ahn A and Josephson R (1998). Energy absorption during running by leg muscles in a cockroach. J Exp Biol 201: 997–1012
Full R, Kubow T, Schmitt J and Koditschek D (2002). Quantifying dynamic stability and maneuverability in legged locomotion. Int Comp Biol 42: 149–157
Guckenheimer J and Holmes P (1990). Nonlinear oscillations, dynamical systems and bifurcations of vector fields. Springer, Berlin
Holmes P, Full R, Koditschek D and Guckenheimer J (2006). The dynamics of legged locomotion: models, analyses and challenges. SIAM Rev 48(2): 207–304
Jindrich D and Full R (2002). Dynamic stabilization of rapid hexapedal locomotion. J Exp Biol 205: 2803–2823
Komsuoglu H, Koditschek D (2000) Preliminary analysis of a biologically inspired 1-dof ‘clock’ stabilized hopper. In: Proc. world multiconf. on systemics, cybernetics and informatics (SCI2000), vol IX, pp 670–675, 23–26 July 2000
Kram R, Wong B and Full R (1997). Three-dimensional kinematics and limb kinetic energy of running cockroaches. J Exp Biol 200: 1919–1929
Kubow T and Full R (1999). The role of the mechanical system in control: a hypothesis of self stabilization in hexapedal runners. Phil Trans R Soc Lond B 354: 849–861
Pearson K (1972). Central programming and reflex control of walking in the cockroach. J Exp Biol 56: 173–193
Poulakakis I, Smith J and Buehler M (2005). Modeling and experiments of untethered quadrupedal running with a bounding gait: the Scout II robot. Int J Robot Res 24(4): 239–256
Poulakakis I, Papadopoulos E and Buehler M (2006). On the stability of the passive dynamics of quadrupedal running with a bounding gait. Int J Robot Res 25(7): 669–687
Ritzmann R, Gorb S, Quinn R (eds) (2004) Arthropod locomotion systems: From biological materials and systems to robotics. Arthropod Struct Dev 33(3)(special issue)
Saranli U, Buehler M and Koditschek D (2001). RHex: A simple and highly mobile hexapod robot. Int J Robot Res 20(7): 616–631
Schmitt J and Holmes P (2000a). Mechanical models for insect locomotion: dynamics and stability in the horizontal plane—I. Theory. Biol Cybern 83(6): 501–515
Schmitt J and Holmes P (2000b). Mechanical models for insect locomotion: dynamics and stability in the horizontal plane—II Application. Biol Cybern 83(6): 517–527
Schmitt J and Holmes P (2001). Mechanical models for insect locomotion: stability and parameter studies. Physica D 156(1–2): 139–168
Schmitt J and Holmes P (2003). Mechanical models for insect locomotion: active muscles and energy losses. Biol Cybern 89(1): 43–55
Schmitt J, Garcia M, Razo C, Holmes P and Full R (2002). Dynamics and stability of legged locomotion in the horizontal plane: a test case using insects. Biol Cybern 86(5): 343–353
Seipel J and Holmes P (2006). Three dimensional translational dynamics and stability of multi-legged runners. Int J Robot Res 25(9): 889–902
Seipel J, Holmes P and Full R (2004). Dynamics and stability of insect locomotion: a hexapedal model for horizontal plane motions. Biol Cybern 91(0): 76–90
Ting L, Blickhan R and Full R (1994). Dynamic and static stability in hexapedal runners. J Exp Biol 197: 251–269
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kukillaya, R.P., Holmes, P.J. A hexapedal jointed-leg model for insect locomotion in the horizontal plane. Biol Cybern 97, 379–395 (2007). https://doi.org/10.1007/s00422-007-0180-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00422-007-0180-2