
Abstract
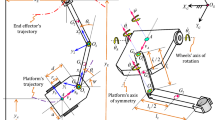
This article presents a general innovative technique for dynamically modeling and control of trajectory tracking in an industrial manipulator with multi-rigid links (connected by rotary-sliding (R-S) joints), which is installed on a non-holonomic moving platform on wheels. To accomplish this purpose, first the Gibbs-Appell (G-A) technique is used for getting the dynamic equations of the mentioned manipulator. Indeed, by employing the G-A methodology, one gets rid of the difficulties of Lagrange Multipliers that originate from non-holonomic constraints. To show the generality of the proposed technique, a recursive predictive control-based formulation is subsequently developed for the studied mechanism to systematically find the kinematic control rules. This multivariable kinematic controller specifies the desired angular and linear velocities of the moving base and manipulator links by finding the minimum tracking error between the system’s current position and reference trajectory from a point-wise quadratic objective function. Again, according to the predictive control approach, the system’s dynamic model in state space form and the desired velocities achieved from the kinematic controller are used to obtain the appropriate input torque and force controls while taking the existing uncertainties into consideration. Lastly, computer simulations are performed to emphasize that the suggested method is able to mathematically model the moving platform and end-effector of such complex robotic systems and also control their trajectory tracking.
Similar content being viewed by others

References
De Luca, A., Oriolo, G.: Chapter 7: Modeling and control of nonholonomic mechanical systems. In: Kinematics and Dynamics of Multi-Body Systems, pp. 277–342. Springer Verlag, Wien (1995)
Vinay, T., Postma, B., Kangsanant, T.: Dynamic modeling and control of dual wheeled mobile robots compliantly coupled to a common payload. J. Dyn. Syst. Meas. Control. 121(3), 457–461 (1999)
Song, J.B., Byun, K.S.: Design and control of a four-wheeled omnidirectional mobile robot with steerable omnidirectional wheels. J. Field Robot. 21(4), 193–208 (2004)
Yu, W., Chuy, O.Y., Collins, E.G., Hollis, P.: Analysis and experimental verification for dynamic modeling of a skid-steered wheeled vehicle. IEEE Trans. Robot. 26(2), 340–353 (2010)
Chen, H., Wang, C., Yang, L., Zhang, D.: Semiglobal stabilization for nonholonomic mobile robots based on dynamic feedback with inputs saturation. J. Dyn. Syst. Meas. Control. 134(4), 1–8 (2012)
Saha, S.K., Angeles, J.: Dynamics of non-holonomic mechanical systems using a natural orthogonal complement. Trans. ASME J. Appl. Mech. 58(1), 238–243 (1991)
Vossoughi, G., Pendar, H., Heidari, Z., Mohammadi, S.: Assisted passive snake-like robots: conception and dynamic modeling using Gibbs-Appell method. Robotica. 26(3), 267–276 (2008)
Tanner, H.G., Kyriakopouos, K.J., Krikelis, N.I.: Advanced agricultural robots: kinematics and dynamics of multiple mobile manipulators handling non-rigid material. Comput. Electr. Agric. 31(1), 91–105 (2001)
Thanjavur, K., Rajagopalan, R.: Ease of dynamic modeling of wheeled mobile robots (WMRs) using Kane’s approach. IEEE Proc. Int. Conf. Robot. Autom. 2926–2931 (1997)
Shafei, A.M., Shafei, H.R.: Planar multibranch open-loop robotic manipulators subjected to ground collision. J. Comput. Nonlinear Dyn. Trans. ASME. 12(6), 1–14 (2017)
Korayem, M.H., Shafei, A.M., Absalan, F., Kadkhodaei, B., Azimi, A.: Kinematic and dynamic modeling of viscoelastic robotic manipulators using Timoshenko beam theory: theory and experiment. Int. J. Adv. Manuf. Technol. 71(5–8), 1005–1018 (2014)
Shafei, A.M., Shafei, H.R.: Dynamic modeling of tree-type robotic systems by combining 3×3 rotation matrices and 4×4 transformation ones. Multibody Syst. Dyn. 44(4), 367–395 (2018)
Bae, D.S., Haug, E.J.: A recursive formulation for constrained mechanical system dynamics: part I. open loop system. Mech. Struct. Mach. 15, 359–382 (1987)
Shafei, A.M., Shafei, H.R.: Dynamic behavior of flexible multiple links captured inside a closed space. J. Comput. Nonlinear Dyn. Trans. ASME. 11(5), 1–13 (2016)
Korayem, M.H., Shafei, A.M., Dehkordi, S.F.: Systematic modeling of a chain of N-flexible link manipulators connected by revolute-prismatic joints using recursive Gibbs-Appell formulation. Arch. Appl. Mech. 84(2), 187–206 (2014)
Shafei, A.M., Shafei, H.R.: Dynamic modeling of planar closed-chain robotic manipulators in flight and impact phases. Mech. Mach. Theory. 126, 141–154 (2018)
Saha, S.K.: Inverse dynamics algorithm for space robots. J. Dyn. Syst. Meas. Control. 118(3), 625–629 (1996)
Shafei, A.M., Shafei, H.R.: A systematic method for the hybrid dynamic modeling of open kinematic chains confined in a closed environment. Multibody Syst. Dyn. 38(1), 21–42 (2016)
Korayem, M.H., Shafei, A.M.: Application of recursive Gibbs-Appell formulation in deriving the equations of motion of N-viscoelastic robotic manipulators in 3D space using Timoshenko beam theory. Acta Astronautica. 83, 273–294 (2013)
Naudet, J., Lefeber, D., Daerden, F., Terze, Z.: Forward dynamics of open-loop multibody mechanisms using an efficient recursive algorithm based on canonical momenta. Multibody Syst/ Dyn. 10, 45–59 (2003)
Rezaei, V., Shafei, A.M.: Dynamic analysis of flexible robotic manipulators constructed of functionally graded materials. Iran. J. Sci. Technol. Trans. Mech. Eng. 43(1), 327–342 (2019)
Korayem, M.H., Shafei, A.M., Doosthoseini, M., Absalan, F., Kadkhodaei, B.: Theoretical and experimental investigation of viscoelastic serial robotic manipulators with motors at the joints using Timoshenko beam theory and Gibbs–Appell formulation. Proc. Inst. Mech. Eng. K J. Multi-body Dyn. 230(1), 37–51 (2016)
Yamamoto, Y., Yun, X.: Coordinating locomotion and manipulation of a mobile manipulator. IEEE Trans. Autom. Control. 39(6), 1326–1332 (1994)
Yu, Q., Chen, I.-M.: A genera approach to dynamics of nonholonomic mobile manipulator systems. ASME J. Dyn. Syst. Meas. Control. 124(4), 512–521 (2002)
Boyer, F., Ali, S.: Recursive inverse dynamics of multibody systems with joints and wheels. IEEE Trans. Robot. 27(2), 215–228 (2011)
Korayem, M.H., Shafei, A.M., Shafei, H.R.: Dynamic modeling of nonholonomic wheeled mobile manipulators with elastic joints using recursive Gibbs-Appell formulation. Scientia Iranica Trans. B-Mech. Eng. 19(4), 1092–1104 (2012)
Korayem, M.H., Shafei, A.M.: A new approach for dynamic modeling of n-viscoelastic-link robotic manipulators mounted on a Mobile Base. Nonlinear Dyn. 79(4), 2767–2786 (2015)
Mata, V., Provenzano, S., Cuadrado, J.I., Valero, F.: Serial-robot dynamics algorithms for moderately large number of joints. Mech. Mach. Theory. 37, 739–755 (2002)
Korayem, M.H., Shafei, A.M., Seidi, E.: Symbolic derivation of governing equations for dual-arm mobile manipulators used in fruit-picking and the pruning of tall trees. Comput. Electron. Agric. 105, 95–102 (2014)
Korayem, M.H., Shafei, A.M.: Motion equation of nonholonomic wheeled mobile robotic manipulator with revolute-prismatic joints using recursive Gibbs-Appell formulation. Appl. Math. Model. 39(5–6), 1701–1716 (2015)
Brockett, R.W.: Asymptotic stability and feedback stabilization. In: Brockett, R.W., Millman, R.S., Sussmann, H.J. (eds.) Differential Geometric Control Theory, pp. 181–191. Birkhuser, Boston (1983)
Lin, S., Goldenberg, A.A.: Robust damping control of mobile manipulators. IEEE Trans. Syst. Man Cybern. B (Cybernetics). 32(1), 126–132 (2002)
White, G.D., Bhatt, R.M., Tang, C.P., Krovi, V.N.: Experimental evaluation of dynamic redundancy resolution in a nonholonomic wheeled mobile manipulator. IEEE/ASME Trans. Mechatronics. 14(3), 349–357 (2009)
Rigatos, G.G., Tzafestas, C.S., Tzafestas, S.G.: Mobile robot motion control in partially unknown environments using a sliding-mode fuzzy-logic controller. Robot. Auton. Syst. 33(1), 1–11 (2000)
Yi, S., Zhai, J.: Ardaptive Second-Order Fast Nonsingular Terminal Sliding Mode Control for Robotic Manipulators. ISA Trans. (2019). https://doi.org/10.1016/j.isatra.2018.12.046
Boukens, M., Boukabou, A., Chadli, M.: Robust adaptive neural network-based trajectory tracking control approach for nonholonomic electrically driven mobile robots. Robot. Auton. Syst. 92, 30–40 (2017)
Tzafestas, S.G., Deliparaschos, K.M., Moustris, G.P.: Fuzzy logic path tracking control for autonomous non-holonomic mobile robots: Design of System on a Chip. Robot. Auton. Syst. 58(8), 1017–1027 (2010)
Goulet, J.F., de Silva, C.W., Modi, V.J., Misra, A.K.: Hierarchical control of a space-based deployable manipulator using fuzzy logic. J. Guid. Control. Dyn. 24(2), 395–405 (2001)
Xin, L., Wang, Q., She, J., Li, Y.: Robust adaptive tracking control of wheeled mobile robot. Robot. Auton. Syst. 78, 36–48 (2016)
Dong, W.: On trajectory and force tracking control of constrained mobile manipulators with parameter uncertainty. Automatica. 38(9), 1475–1484 (2002)
Syed, U.A., Kunwar, F., Iqbal, M.: Guided Autowave Pulse Coupled Neural Network (GAPCNN) based real time path planning and an obstacle avoidance scheme for mobile robots. Robot. Auton. Syst. 6(4), 474–486 (2014)
Yi, G., Mao, J., Wang, Y., Guo, S., Miao, Z.: Adaptive tracking control of nonholonomic mobile manipulators using recurrent neural networks. Int. J. Control. Autom. Syst. 16(3), 1390–1403 (2018)
Shafei, A.M., Korayem, M.H.: Theoretical and experimental study of DLCC for flexible robotic arms in point-to-point motion. Opt. Control Appl. Methods. 38(6), 963–972 (2017)
Bakdi, A., Hentout, A., Boutami, H., Maoudj, A., Hachour, O., Bouzouia, B.: Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control. Robot. Auton. Syst. 89, 95–109 (2017)
Li, Z., Kang, Y.: Dynamic coupling switching control incorporating support vector machines for wheeled mobile manipulators with hybrid joints. Automatica. 46(5), 832–842 (2010)
Boukattaya, M., Jallouli, M., Damak, T.: On trajectory tracking control for nonholonomic mobile manipulators with dynamic uncertainties and external torque disturbances. Robot. Auton. Syst. 60(12), 1640–1647 (2012)
Chen, N., Song, F., Li, G., Sun, X., Ai, C.: An adaptive sliding mode backstepping control for the mobile manipulator with nonholonomic constraints. Commun. Nonlinear Sci. Numer. Simul. 18(10), 2885–2899 (2013)
Peng, J., Yu, J., Wang, J.: Robust adaptive tracking control for nonholonomic mobile manipulator with uncertainties. ISA Trans. 53(4), 1035–1043 (2014)
Huynh, H.N., Verlinden, O., Wouwer, A.V.: Comparative application of model predictive control strategies to a wheeled mobile robot. J. Intell. Robot. Syst. 87, 81–95 (2017)
Rossiter, J.A.: Model-Based Predictive Control: A Practical Approach. Taylor and Francis Group CRC Press (2003)
Forbes, M.G., Patwardhan, R.S., Hamadah, H.: Model predictive control in industry: challenges and opportunities. IFAC Papers Online. 2015(48), 531–538 (2015)
Mirzaeinejad, H., Shafei, A.M.: Modeling and trajectory tracking control of a two-wheeled mobile robot: Gibbs–Appell and prediction-based approaches. Robotica. 36(10), 1551–1570 (2018)
Lu, P.: Optimal predictive control of continuous nonlinear system. Int. J. Control. 62, 633–649 (1995)
Jafari, M., Mirzaei, M., Mirzaeinejad, H.: Optimal nonlinear control of vehicle braking torques to generate practical stabilizing yaw moments. Int. J. Automot. Mech. Eng. 11, 2639 (2015)
Mirzaeinejad, H., Mirzaei, M.: A new approach for modelling and control of two-wheel anti-lock brake systems. Proc. Inst. Mech. Eng. K J. Multi-body Dyn. 225, 179–192 (2011)
Mirzaeinejad, H., Mirzaei, M., Kazemi, R.: Enhancement of vehicle braking performance on split-k roads using optimal integrated control of steering and braking systems. Proc. Inst. Mech. Eng. K J. Multi-body Dyn. 230, 401–415 (2016)
Mirzaei, M., Mirzaeinejad, H.: Fuzzy scheduled optimal control of integrated vehicle braking and steering systems. IEEE/ASME Trans Mechatronics. 22, 2369–2379 (2017)
Slotine, J.J.E., Li, W.: Applied Nonlinear Control. Prentice-Hall, Englewood Cliffs (1991)
Mirzaeinejad, H., Mirzaei, M.: A novel method for non-linear control of wheel slip in anti-lock braking systems. Control. Eng. Pract. 18, 918–926 (2010)
Mirzaeinejad, H., Mirzaei, M., Rafatnia, S.: A novel technique for optimal integration of active steering and differential braking with estimation to improve vehicle directional stability. ISA Trans. 80, 513–527 (2018)
Chen, W.H., Balance, D.J., Gawthrop, P.J.: Optimal control of nonlinear systems: a predictive control approach. Automatica. 39(4), 633–641 (2003)
Mirzaeinejad, H.: Optimization-based nonlinear control laws with increased robustness for trajectory tracking of non-holonomic wheeled mobile robots. J. Transport. Res. C. 101, 1–17 (2019)
Mirzaeinejad, H.: Robust predictive control of wheel slip in antilock braking systems based on radial basis function neural network. Appl. Soft Comput. 70, 318–329 (2018)
Khalil, H.: Nonlinear Systems, 2nd edn. Prentice Hall, New Delhi (1996)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shafei, A.M., Mirzaeinejad, H. A General Formulation for Managing Trajectory Tracking in Non-holonomic Moving Manipulators with Rotary-Sliding Joints. J Intell Robot Syst 99, 729–746 (2020). https://doi.org/10.1007/s10846-019-01143-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10846-019-01143-6