
Abstract
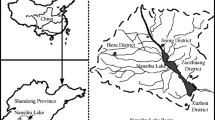
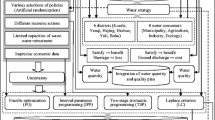
In this study, an interval-stochastic-based risk analysis (RSRA) method is developed for supporting river water quality management in a rural system under uncertainty (i.e., uncertainties exist in a number of system components as well as their interrelationships). The RSRA method is effective in risk management and policy analysis, particularly when the inputs (such as allowable pollutant discharge and pollutant discharge rate) are expressed as probability distributions and interval values. Moreover, decision-makers’ attitudes towards system risk can be reflected using a restricted resource measure by controlling the variability of the recourse cost. The RSRA method is then applied to a real case of water quality management in the Heshui River Basin (a rural area of China), where chemical oxygen demand (COD), total nitrogen (TN), total phosphorus (TP), and soil loss are selected as major indicators to identify the water pollution control strategies. Results reveal that uncertainties and risk attitudes have significant effects on both pollutant discharge and system benefit. A high risk measure level can lead to a reduced system benefit; however, this reduction also corresponds to raised system reliability. Results also disclose that (a) agriculture is the dominant contributor to soil loss, TN, and TP loads, and abatement actions should be mainly carried out for paddy and dry farms; (b) livestock husbandry is the main COD discharger, and abatement measures should be mainly conducted for poultry farm; (c) fishery accounts for a high percentage of TN, TP, and COD discharges but a has low percentage of overall net benefit, and it may be beneficial to cease fishery activities in the basin. The findings can facilitate the local authority in identifying desired pollution control strategies with the tradeoff between socioeconomic development and environmental sustainability.









Similar content being viewed by others

References
Ahmadi A, Moridi A, Han D (2015) Uncertainty assessment in environmental risk through Bayesian networks. J Environ Inform 25(1):46-59
Ahmed S, Sahinidis NV (1998) Robust process planning under uncertainty. Ind Eng Chem Res 37:1883–1892
Barbaro A, Bagajewicz MJ (2004) Managing financial risk in planning under uncertainty. Process Syst Eng 50(5):963–989
Chau NDG, Sebesvari Z, Amelung W, Renaud FG (2015) Pesticide pollution of multiple drinking water sources in the Mekong Delta Vietnam: evidence from two provinces. Environ Sci Pollut Res. doi:10.1007/s11356-014-4034-x
Chen HW, Chang NB (2006) Decision support for allocation of watershed pollution load using grey fuzzy multiobjective programming. J Am Water Resour Assoc 42:725–745
Comte I, Colin F, Grünberger O, Whalen JK, Widodo RH, Caliman JP (2015) Watershed-scale assessment of oil palm cultivation impact on water quality and nutrient fluxes: a case study in Sumatra (Indonesia). Environ Sci Pollut Res 22:7676–7695
Dowd BM, Press D, Huertos ML (2008) Agricultural nonpoint source water pollution policy: the case of California’s Central Coast. Agric Ecosyst Environ 128:151–161
Fleifle A, Saavedra O, Yoshimura C, Elzeir M, Tawfik A (2014) Optimization of integrated water quality management for agricultural efficiency and environmental conservation. Environ Sci Pollut Res 21:8095–8111
González SO, Almeida CA, Calderón M, Mallea MA, González P (2014) Assessment of the water self-purification capacity on a river affected by organic pollution: application of chemometrics in spatial and temporal variations. Environ Sci Pollut Res 21:10583–10593
Gren IM (2008) Adaptation and mitigation strategies for controlling stochastic water pollution: an application to the Baltic Sea. Ecol Econ 66(2-3):337–347
Han S, Kim E, Kim S (2009) The water quality management in the Nakdong River watershed using multivariate statistical techniques. J Civ Eng 13(2):97–105
Harrison KW (2007) Two-stage decision-making under uncertainty and stochasticity: Bayesian programming. Adv Water Resour 30(3):641–664
Huang GH (1996) IPWM: an interval parameter water quality management model. Eng Optim 26:79–103
Huang GH, Loucks DP (2000) An inexact two-stage stochastic programming model for waster resources management under uncertainty. Civ Eng Environ Syst 17:95–118
Huang GH, Chen B, Qin XS Mance E et al (2006). An integrated decision support system for developing rural eco-environmental sustainability in the mountain-river-lake region of Jiangxi Province, China (final report), submitted to United Nations Development Program
Huang GH, Qin XS, Sun W, Nie XH, Li YP (2009) An optimisation-based environmental decision support system for sustainable development in a rural area in China. Civ Eng Environ Syst 26(1):65–83
Kerachian R, Karamouz M (2007) A stochastic conflict resolution model for water quality management in reservoir–river systems. Adv Water Resour 30(4):866–882
Li YP, Huang GH (2009) Two-stage planning for sustainable water-quality management under uncertainty. J Environ Manag 90:2402–2413
Li Z, Huang G, Zhang YM, Li YP (2013) Inexact two-stage stochastic credibility constrained programming for water quality management. Resour Conserv Recycl 73:122–132
Li YP, Huang GH, Li HZ, Liu J (2014) A recourse-based interval fuzzy programming model for point-nonpoint source effluent trading under uncertainty. J Am Water Resour Assoc 50(5):1191–1207
Liu ZF, Huang GH (2009) Dual-interval two-stage optimization for flood management and risk analyses. Water Resour Manag 23:2141–2162
Liu J, Li YP, Huang GH, Nie S (2015) Development of a fuzzy-boundary interval programming method for water quality management under uncertainty. Water Resour Manag 29:1169–1191
Llopis-Albert C, Palacios-Marqués D, Merigóc JM (2014) A coupled stochastic inverse-management framework for dealing with nonpoint agriculture pollution under groundwater parameter uncertainty. J Hydrol 511:10–16
Mance E (2007) An inexact two-stage water quality management model for the river basin in Yongxin County. Ph.D. Dissertation, University of Regina, Regina, Canada
McCray AW (1975) Petroleum evaluations and economic decisions. Prentice Hall, Englewood Cliffs
Mujumdar PP, Saxena P (2004) A stochastic dynamic programming model for stream water quality management. Sadhana 29(5):477–497
Ocampo-Duque W, Osorio C, Piamba C, Schuhmacher M, Domingo JL (2013) Water quality analysis in rivers with non-parametric probability distributions and fuzzy inference systems: application to the Cauca River, Colombia. Environ Int 52:17–18
Peña-Haro S, Pulido-Velazquez M, Llopis-Albert C (2011) Stochastic hydro-economic modeling for optimal management of agricultural groundwater nitrate pollution under hydraulic conductivity uncertainty. Environ Model Softw 26(8):999–1008
Schaffner M, Bader HP, Ruth Scheidegger R (2009) Modeling the contribution of point sources and non-point sources to Thachin River water pollution. Sci Total Environ 47:4902–4915
Xu TY, Qin XS (2013) Solving water quality management problem through combined genetic algorithm and fuzzy simulation. J Environ Inform 22(1):39–48
Xu JY, Li YP, Huang GH (2013) A hybrid interval–robust optimization model for water quality management in New Binhai district of Tianjin, China. Environ Eng Sci 30(5):248–263
Yongxin Bureau of Statistics (2012) Statistical communiqué on the 2011 economic and social Development in Yongxin
Zhang XD, Huang GH, Nie XH (2009) Optimal decision schemes for agricultural water quality management planning with imprecise objective. Agric Water Manag 96:1723–1731
Acknowledgments
This research was supported by the National Natural Science Foundation (51225904 and 51190095) and the 111 Project (B14008). The authors are grateful to the editors and the anonymous reviewers for their insightful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible editor: Marcus Schulz
Appendices
Appendix 1
Solution method
In RSRA model, the first-stage decision variables x ± j in the model are expressed as intervals, which should be identified before the random variables are disclosed (Huang and Loucks 2000). Consequently, decision variables u j are introduced to identify an optimized set of the first-stage values for supporting the related policy analyses. Let x ± j = x − j + Δx j u j , where Δx j = x + j − x − j and u j ∈ [0, 1]. Then, a two-step process is proposed to transform the model into two deterministic submodels that are associated with the lower and upper bounds of the desired objective. Since the objective is to be maximized, the submodel corresponding to f + (i.e., most desirable objective) can be firstly formulated:
subject to:
where u j , z − h , y − jh , and y + jh are decision variables; y − jh (j = 1, 2, …, k 2) are decision variables with positive coefficients in the objective function; y + jh (j = k 2 + 1, k 2 + 2, …, n 2) are decision variables with negative coefficients. Solutions of y − jh (j = 1, 2, …, k 2), y + jh (j = k 2 + 1, k 2 + 2, …, n 2), u j , and z − h can be obtained through solving submodel (18). The optimized first-stage variables are x ± j opt = x − j + Δx j u j opt (j = 1, 2, …, n 1). Then, the submodel corresponding to the lower-bound objective-function value (f −) is as follows:
subject to:
where z − h , y + jh (j = 1, 2, …, k 2), and y − jh ( j = k 2 + 1, k 2 + 2, …, n 2) are decision variables. Solutions of z − h , y + jh ( j = 1, 2, …, k 2), and y − jh (j = k 2 + 1, k 2 + 2, …, n 2) can be obtained through solving submodel (19). Through integrating the solutions of the two sets of submodels, the solution for the objective-function value can be obtained. The detailed computational processes for solving the RSRA model can be summarized as follows:
-
Step 1.
Formulate the RSRA model.
-
Step 2.
Transform the RSRA model into two submodels, based on an interactive algorithm.
-
Step 3.
Formulate and solve the upper bound submodel corresponding to f +, obtain x ± j opt and y + jh opt , and calculate f +opt .
-
Step 4.
Formulate and solve the f − submodel base on the solutions obtained through step 3, obtain y − jh opt , and calculate f −opt .
-
Step 5.
Construct the corresponding risk curve. If the decision-maker is satisfied with the current level of risk then stop; otherwise, go to step 6.
-
Step 6.
Let the allowable risk exposure level from the decision-makers be ε ± and the corresponding cost aspiration level be η ±.
-
Step 7.
Formulate the RSRA problem with the objective being maximized under chosen ε ± and η ±.
-
Step 8.
If the decision-maker is satisfied with the solutions, then stop. Otherwise, go to step 6 for the next level.
Appendix 2
Nomenclatures for variables and parameters
- i :
-
index for economic activities; for agricultural activities, i = 1, 2,…, I a ; for fishery activities i = 1, 2,…, I f (e.g., fish and prawn farming); for livestock husbandry activities i = 1, 2,…, I l ; for industrial activities i = 1, 2,…, I i (e.g., manufacturing, mining, architecture, and transportation); for forestry activities i = 1, 2,…, I w
- j :
-
index for zones; j = 1, 2,…, J
- k :
-
index for pollutants; k = 1, 2,…, K (e.g., COD discharge, TN loss, TP loss, and soil loss)
- h :
-
allowable pollutant discharge scenario; h = 1, 2,…, H
- p h :
-
probability of occurrence allowable pollutant discharge level h (%)
- f ±AGR :
-
sub-total benefit of agriculture (RMB¥)
- f ±FIS :
-
sub-total benefit of fishery (RMB¥)
- f ±LIV :
-
sub-total benefit of livestock husbandry (RMB¥)
- f ±IND :
-
sub-total benefit of industry (RMB¥)
- f ±FOR :
-
sub-total benefit of forestry (RMB¥)
- BA ± ij :
-
unit benefit from agricultural activity i in zone j (RMB¥/km2)
- TA ± ij :
-
land area target for agricultural activity i in zone j (km2)
- PEA ± ik :
-
reduction of net benefit from agricultural activity i for excess discharge of pollutant k (RMB¥/kg when k = 2, 3; RMB¥/t when k = 4)
- DPA ± ijk :
-
discharge rate of pollutant k from agricultural activity i in zone j (kg/km2 when k = 2, 3; t/km2 when k = 4)
- XA ± ijhk :
-
decision variables representing amount by which the target of agricultural activity i discharge pollutant k exceeds standards in zone j when scenario is h (km2)
- BF ± ij :
-
unit benefit from fishery activity i in zone j (RMB¥/km2)
- TF ± ij :
-
land area target for fishery farming activity i in zone j (km2)
- PEF ± ik :
-
reduction of net benefit from fishery activity i for excess discharge of pollutant k (RMB¥/kg)
- DPF ± ijk :
-
discharge rate of pollutant k from fishery activity i in zone j (kg/km2)
- XF ± ijhk :
-
decision variables representing amount by which target of fishery activity i discharge pollutant k exceeds standards in zone j when scenario is h (km2)
- BL ± ij :
-
unit benefit from livestock husbandry activity i in zone j (RMB¥/head)
- TL ± ij :
-
target for livestock husbandry activity i in zone j (head)
- PEL ± i :
-
reduction of net benefit from livestock husbandry activity i for excess discharge of pollutant (i.e., COD) (RMB¥/kg)
- DPL ± ij :
-
discharge rate of pollutant (i.e., COD) from livestock husbandry activity i in zone j (kg/head)
- XL ± ijh :
-
decision variables representing amount by which target of livestock husbandry activity i discharge pollutant (i.e., COD) exceeds standards in zone j when scenario is h (head)
- TI ± ij :
-
output target for industrial activity i in zone j (RMB¥)
- PEI ± i :
-
reduction of net benefit from industrial activity i for excess discharge of pollutant (i.e., COD) (RMB¥/kg)
- DPI ± ij :
-
discharge rate of pollutant (i.e., COD) from industrial activity i in zone j (kg/ RMB¥)
- XI ± ijh :
-
decision variables representing amount by which target of industrial activity i discharge pollutant (i.e., COD) exceeds standards in zone j when scenario is h (RMB¥)
- BW ± ij :
-
unit benefit from forestry activity i in zone j (RMB¥/head)
- TW ± ij :
-
land area target for forestry activity i in zone j (unit)
- PEW ± i :
-
reduction of net benefit from forestry activity i for excess discharge of pollutant (i.e., soil loss) (RMB¥/t)
- DPW ± ij :
-
discharge rate of pollutant (i.e., soil loss) from forestry activity i in zone j (t/km2)
- XW ± ijh :
-
decision variables representing amount by which target of forestry activity i discharge pollutant (i.e., soil loss) exceeds standards in zone j when scenario is h (unit)
- COF ± ij :
-
COD discharge from fishery farming activity i in zone j (kg/km2)
- PCF ± jh :
-
maximum allowable COD discharge for fishery farming activities in zone j with probability p h of occurrence under scenario h (kg)
- PCL ± jh :
-
maximum allowable COD discharge for livestock husbandry activities in zone j with probability p h of occurrence under scenario h (kg)
- PCI ± jh :
-
maximum allowable COD discharge for industrial activity i in zone j with probability p h of occurrence under scenario h (kg)
- MCL ± h :
-
maximum allowable COD discharge from economic activities with probability p h of occurrence under scenario h (kg)
- SL ± ij :
-
soil loss from agricultural activity i in zone j (t/km2)
- AP ± ij :
-
phosphorous content of soil corresponding to agricultural activity i in zone j (kg/t)
- RA ± ij :
-
runoff from agricultural activity i in zone j (kg/km2)
- RP ± ij :
-
dissolved phosphorous content of runoff corresponding to agricultural activity i in zone j (%)
- PAP ± jh :
-
maximum allowable phosphorous loss from agricultural activities in zone j with probability p h of occurrence under scenario h (kg)
- FP ± ij :
-
dissolved phosphorous loss from fishery farming activity i in zone j (kg/km2)
- PFP ± jh :
-
maximum allowable phosphorous loss from fishery farming activities in zone j with probability p h of occurrence under scenario h (kg)
- MPL ± h :
-
maximum allowable phosphorous loss from economic activities with probability p h of occurrence under scenario h (kg)
- AN ± ij :
-
nitrogen content of soil corresponding to agricultural activity i in zone j (kg/t)
- RN ± ij :
-
dissolved nitrogen content of runoff corresponding to agricultural activity i in zone j (%)
- PAN ± jh :
-
maximum allowable nitrogen loss from agricultural activities in zone j with probability p h of occurrence under scenario h (kg)
- FN ± ij :
-
dissolved nitrogen loss from fishery activity i in zone j (kg/km2)
- PFN ± jh :
-
maximum allowable nitrogen loss from fishery farming activities in zone j with probability p h of occurrence under scenario h (kg)
- η ± :
-
targeted benefit level of economic activities (RMB¥)
- z ± h :
-
integer variable, which would take a value of zero if the benefit for each economic activity under scenario h is greater than or equal to the target level (η ±) and a value of 1 otherwise
- UB h :
-
upper bound benefit under each scenario h (RMB¥)
- ε ± :
-
desired risk exposure level of economic activity
- MSL ± jh :
-
maximum allowable soil loss from economic activities with probability p h of occurrence under scenario h (t)
- MNL ± h :
-
maximum allowable nitrogen loss from economic activities with probability p h of occurrence under scenario h (kg)
- PSL ± jh :
-
maximum allowable soil loss from agricultural activities in zone j with probability p h of occurrence under scenario h (t)
- PWS ± jh :
-
maximum allowable soil loss from forestry activities in zone j with probability p h of occurrence under scenario h (t)
- WA ± i :
-
water demand for agricultural activity i (m3/km2)
- WF ± i :
-
water demand for fishery activity i (m3/km2)
- WL ± i :
-
water demand for livestock husbandry activity i (m3/head)
- WI ± i :
-
water demand for industrial activity i (m3/RMB¥)
- WW ± i :
-
water demand for forestry activity i (m3/km2)
- MAXW ± j :
-
maximum allowable water resources supply amount in zone j (m3)
- TA ± i min :
-
minimum demand for agricultural activity i (km2)
- TA ± i max :
-
maximum demand for agricultural activity i (km2)
- TF ± i min :
-
minimum demand for fishery activity i (km2)
- TF ± i max :
-
maximum demand for fishery activity i (km2)
- TL ± i min :
-
minimum demand for livestock husbandry activity i (head)
- TL ± i max :
-
maximum demand for livestock husbandry activity i (head)
- TW ± i min :
-
minimum demand for industrial activity i (RMB¥)
- TW ± i max :
-
maximum demand for industrial activity i (RMB¥)
Rights and permissions
About this article

Cite this article
Liu, J., Li, Y.P., Huang, G.H. et al. An integrated optimization method for river water quality management and risk analysis in a rural system. Environ Sci Pollut Res 23, 477–497 (2016). https://doi.org/10.1007/s11356-015-5250-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11356-015-5250-8