
Abstract
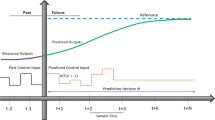
This paper presents development of a control system for ecological driving of a hybrid vehicle. Prediction using traffic signal and road slope information is considered to improve the fuel economy. It is assumed that the automobile receives traffic signal information from intelligent transportation systems (ITS). Model predictive control is used to calculate optimal vehicle control inputs using traffic signal and road slope information. The performance of the proposed method was analyzed through computer simulation results. Both the fuel economy and the driving profile are optimized using the proposed approach. It was observed that fuel economy was improved compared with driving of a typical human driving model.
Similar content being viewed by others

References
E. Hellstom, M. Ivarsson, J. Aslund, et al. Look-ahead control for heavy trucks to minimize trip time and fuel consumption. Control Engineering Practice, 2009, 17(2): 245–254.
M. Kuroki, M. Mukai, J. Murata, et al. Vehicular model predictive control for optimal fuel consumption based on engine map. Proceedings of the 28th Kyushu Annual Congresses of the Society of Instrument and Control Engineers, Fukuoka, Japan, 2009: 29–30 (in Japanese).
M. Kamal, M. Mukai, J. Murata, et al. Ecological vehicle control on roads with up-down slopes. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 783–794.
C. Zhang, A. Vahidi, P. Pisu, et al. Role of terrain preview in energy management of hybrid electric vehicles. IEEE Transactions on Vehicular Technology, 2010, 59(3): 1139–1147.
K. Yu, J. Yang. Performance of a nonlinear real-time optimal control system for HEVs/PHEVs during car following. Journal of Applied Mathematics, 2014: DOI 10.1155/2014/879232.
K. Yu, M. Mukai, T. Kawabe. Model predictive control of a powersplit hybrid electric vehicle system. Artificial Life and Robotics, 2012, 17(2): 221–226.
K. Yu, M. Mukai, T. Kawabe. A battery management system using nonlinear model predictive control for a hybrid electric vehicle. Proceedings of the 7th IFAC Symposium on Advances in Automotive Control, Tokyo: Elsevier, 2013: 301–306.
M. A. S. Kamal, M. Mukai, J. Murata, et al. On board ecodriving system for varying road-traffic environments using model predictive control. IEEE Multi-Conference on Systems and Control, Yokohama: IEEE, 2010: 1636–1641.
T. Kawabe, M. A. S. Kamal, M. Mukai, et al. Model predictive control for ecological platoon driving. Proceedings of the JSAE Annual Congress (Autumn), Sendai, Japan: JSAE (Society of Automotive Engineers of Japan), 2009: 19–22.
M. Barth, K. Boriboonsomsin. Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transportation Research Part D, 2009, 14(6): 400–410.
Y. Saboohi, H. Farzaneh. Model for developing an eco-driving strategy of a passenger vehicle based on the least fuel consumption. Applied Energy, 2009, 86(10): 1925–1932.
B. Zhou, J. Cao, X. Zeng, et al. Adaptive traffic light control in wireless sensor network-based intelligent transportation system. Proceedings of the 72nd Vehicular Technology Conference, Ottawa: IEEE, 2010: 1–5.
B. Asadi, A. Vahidi. Predictive cruise control: utilizing upcoming traffic signal information for improving fuel economy and reducing trip time. IEEE Transactions on Control Systems Technology, 2011, 19(3): 707–714.
Japan Society of Traffic Engineers (JSTE). Manual on Traffic Signal Control. Revised ed. Tokyo: JSTE, 2006.
J. Liu, H. Peng. Modeling and control of a power-split hybrid vehicle. IEEE Transactions on Control Systems Technology, 2008, 16(6): 1242–1251.
M. Ehsani, Y. Gao, A. Emadi. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles: Fundamentals, Theory, and Design. 2nd ed. Boca Raton, FL: CRC Press, 2009: 117–136.
G. Rizzoni, L. Guzzella, B. Baumann. Unified modeling of hybrid electric vehicle drivetrains. IEEE-ASME Transactions on Mechatronics, 1999, 4(3): 246–257.
T. Ohtsuka. A continuation/GMRES method for fast computation of nonlinear receding horizon control. Automatica, 2004, 40(4): 563–574.
P. G. Gipps. A behavioural car-following model for computer simulation. Transportation Research Part B, 1981, 15(2): 105–111.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by National Natural Science Foundation of China (Nos. 51405137, 61403129), the Key Scientific Research Program of the Higher Education Institutions of Henan Province (No. 15A470014), the Program for Innovative Research Team of Henan Polytechnic University, and the Doctoral Program Foundation of Henan Polytechnic University.
Kaijiang YU received his Ph.D. degree from Kyushu University in Electrical and Electronic Engineering, Japan, in 2013. He is currently a lecturer of College of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo, China. His research interests include HEV energy management and model predictive control.
Junqi YANG received his Ph.D. degree in Control Theory and Control Engineering from Tongji University, Shanghai, China, in 2013. He is currently a lecturer of College of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo, China. His current research interests include the areas of state estimation, model-based fault detection, and fault-tolerant control.
Daisuke YAMAGUCHI received his M.E. degree from the Department of Electrical Engineering, Kyushu University, Japan, in 2011. His research interests include receding horizon control and its applications.
Rights and permissions
About this article

Cite this article
Yu, K., Yang, J. & Yamaguchi, D. Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control Theory Technol. 13, 17–28 (2015). https://doi.org/10.1007/s11768-015-4058-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-015-4058-x