
Abstract
A series of self-balancing vehicles is stabilized and controlled in this research work. The system is composed of several Segway \(\frac{{\mathrm{TM}}}{}\) type platforms interconnected through flexible links. The system is inherently highly nonlinear and underactuated which makes the tracking task very challenging. In this paper, \(H_\infty \) tracking adaptive fuzzy integral sliding mode control scheme is proposed for n-self-balancing interconnected vehicles system where uncertainties and disturbances are included. First, a nonlinear dynamic model with uncertainties for the train system with n-vehicles is derived using the Lagrangian method assuming the vehicles moving in tandem on a inclined path. Then, the dynamics of the train system with n-vehicles is formulated as an error dynamics according to a specified reference signal. A fuzzy technique with an on-line estimation scheme is developed to approximate the dynamics of the train system with n-vehicles. The advantage of employing an adaptive fuzzy system is the use of linear analytical results instead of estimating nonlinear uncertain functions in dynamics with an online update law. Using the concept of parallel distributed compensation, the adaptive fuzzy scheme combined with the integral sliding mode control scheme is synthesized to address the system uncertainties and the external disturbances such that \(H_\infty \) tracking performance is achieved. Simulation results for 2-self-balancing interconnected vehicles system are presented to show the effectiveness and performance of the proposed control scheme.

































Similar content being viewed by others

Abbreviations
- \(M_{w_{_{i}}}\) :
-
Mass of the wheel of the ith self-balancing vehicle
- \(M_{c_{_{i}}}\) :
-
Mass of the body of the ith self-balancing vehicle
- \(x_{w_{_{i}}}\) :
-
Lateral displacement of the wheel of the ith self-balancing vehicle
- \(x_{c_{_{i}}}\) :
-
Lateral displacement of the cabin of the ith self-balancing vehicle
- \(y_{w_{_{i}}}\) :
-
Vertical displacement of the wheel of the ith self-balancing vehicle
- \(y_{c_{_{i}}}\) :
-
Vertical displacement of the cabin of the ith self-balancing vehicle
- \(J_{w_{_{i}}}\) :
-
Moment of inertia of the wheel of the ith self-balancing vehicle
- \(J_{c_{_{i}}}\) :
-
Moment of inertia of the cabin of the ith self-balancing vehicle
- \(J_{m_{_{i}}}\) :
-
Moment of inertia of the motor of the ith self-balancing vehicle
- \(u_{_{i}}\) :
-
Motor torque output of the ith self-balancing vehicle
- \(\theta _{w_{_{i}}}\) :
-
Angle of rotation of the wheel of the ith self-balancing vehicle
- \(\delta _{c_{_{i}}}\) :
-
The deviation angle of the cabin of the ith self-balancing vehicle
- \(\psi _{c_{_{i}}}\) :
-
Angle of rotation of the cabin of the ith self-balancing vehicle
- \(r_{_{w}}\) :
-
Outer radius of the wheel of the self-balancing vehicle
- r :
-
Inner radius of the wheel of the self-balancing vehicle
- L :
-
Distance of the c.g. from the axis of rotation
- \(\alpha \) :
-
Road inclination
References
Ravichandran MT, Mahindrakar AD (2011) Robust stabilization of a class of underactuated mechanical systems using time scaling and Lyapunov redesign. IEEE Trans Ind Electron 58(9):4299–4313
Do KD (2011) Practical formation control of multiple underactuated ships with limited sensing ranges. IEEE Trans Robot Autom 59(6):457–471
Petkovic D, Pavlovic ND, Cojbasic Z, Pavlovic NT (2013) Adaptive neuro fuzzy estimation of underactuated robotic gripper contact forces. Expert Syst Appl 40(1):281–286
Rudra S, Barai RK, Maitra M (2014) Nonlinear state feedback controller design for underactuated mechanical system: a modified block backstepping approach. ISA Trans 53(2):317–326
Panagou D, Kyriakopoulos KJ (2013) Viability control for a class of underactuated systems. Automatica 49(1):17–29
Xin X, Liu Y (2013) Reduced-order stable controllers for two-link underactuated planar robots. Automatica 49(7):2176–2183
Xu L, Hu Q (2013) Output-feedback stabilisation control for a class of under-actuated mechanical systems. IET Contr Theory Appl 7(7):985–996
Zhuang Y, Huang H (2014) Time-optimal trajectory planning for underactuated spacecraft using a hybrid particle swarm optimization algorithm. Acta Astronaut 94(2):690–698
Reyhanoglu M, van der Shaft A, McClamroch NH, Kalmonofsky I (1999) Dynamics and control of a class of underactuated mechanical systems. IEEE Trans Autom Control 44(9):1663–1671
Chiu CH (2010) The design and implementation of a wheeled inverted pendulum using an adaptive output recurrent cerebellar model articulation controller. IEEE Trans Ind Electron 57(5):1814–1822
Ooshima M, Takeuchi C (2011) Magnetic suspension performance of a bearingless brushless DC motor for small liquid pumps. IEEE Trans Ind Appl 47(1):72–78
Fang Y, Ma B, Wang P, Zhang X (2012) A motion planning-based adaptive control method for an underactuated crane system. IEEE Trans Control Syst Technol 20(1):241–248
Chang YH, Chan WS, Chang CW (2013) T-S fuzzy model-based adaptive dynamic surface control for ball and beam system. IEEE Trans Ind Electron 60(6):2251–2263
Klausen K, Fossen TI, Johansen TA (2017) Nonlinear control with swing damping of a multirotor UAV with suspended load. J Intell Robot Syst 88(2–4):379–394
Li Z (2011) Adaptive fuzzy output feedback motion/force control for wheeled inverted pendulums. IET Contr Theory Appl 5(10):1176–1188
Xu JX, Guo ZQ, Lee TH (2012) Synthesized design of a fuzzy logic controller for an underactuated unicycle. Fuzzy Sets Syst 207:77–93
Tsai CC, Huang HC, Lin SC (2010) Adaptive neural network control of a self-balancing two-wheeled scooter. IEEE Trans Ind Electron 57(4):1420–1428
Li Z, Yang C (2012) Neural-adaptive output feedback control of a class of transportation vehicles based on wheeled inverted pendulum models. IEEE Trans Control Syst Technol 20(6):1583–1591
Iriarte R, Aguilar LT, Fridman L (2013) Second order sliding mode tracking controller for inertia wheel pendulum. J Frankl Inst Eng Appl Math 350(1):92–106
Lopez-Martinez M, Acosta JA, Cano JM (2010) Non-linear sliding mode surfaces for a class of underactuated mechanical systems. IET Contr Theory Appl 4(10):2195–2204
Huang J, Guan ZH, Matsuno T, Fukuda T, Sekiyama K (2010) Sliding-mode velocity control of mobile-wheeled inverted-pendulum systems. IEEE Trans Robot 26(4):750–758
Guo ZQ, Xu JX, Lee TH (2014) Design and implementation of a new sliding mode controller on an underactuated wheeled inverted pendulum. J Frankl Inst Eng Appl Math 351(4):2261–2282
Xu JX, Guo ZQ, Lee TH (2014) Design and implementation of integral sliding-mode control on an underactuated two-wheeled mobile robot. IEEE Trans Ind Electron 61(7):3671–3681
Huang J, Ding F, Fukuda T, Matsuno T (2013) Modeling and velocity control for a novel narrow vehicle based on mobile wheeled inverted pendulum. IEEE Trans Control Syst Technol 21(5):1607–1617
Xi Z, Feng G, Hesketh T (2011) Piecewise integral sliding-mode control for T–S fuzzy systems. IEEE Trans Fuzzy Syst 19(1):65–74
Laghrouche S, Plestan F, Glumineau A (2007) Higher order sliding mode control based on integral sliding surface. Automatica 43(3):531–537
Gao Q, Liu L, Feng G, Wang Y, Qiu J (2014) Universal fuzzy integral sliding-mode controllers based on T–S fuzzy models. IEEE Trans Fuzzy Syst 22(2):350–362
Kim HM, Park SH, Han SI (2009) Precise friction control for the nonlinear friction system using the friction state observer and sliding mode control with recurrent fuzzy neural networks. Mechatronics 19(6):805–815
Ghosh A, Krishnan TR, Subudhi B (2011) Robust proportional-integral-derivative compensation of an inverted cart-pendulum system: an experimental study. IET Contr Theory Appl 6(8):1145–1152
Soria-Lopez A, Martinez-Garcia JC, Aguilar-lbanez CF (2013) Experimental evaluation of regulated non-linear under-actuated mechanical systems via saturation-functions-based bounded control: the cart-pendulum system case. IET Contr Theory Appl 7(12):1642–1650
Adhikary N, Mahanta C (2013) Integral backstepping sliding mode control for underactuated systems: swing-up and stabilization of the cart pendulum system. ISA Trans 52(6):870–880
Kai T, Bito K (2014) A new discrete mechanics approach to swing-up control of the cart-pendulum system. Commun Nonlinear Sci Numer Simulat 19(1):230–244
Lin C-K (2006) Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks. IEEE Trans Fuzzy Syst 14(6):849–859
Chen SY, Lin FJ (2011) Robust nonsingular terminal sliding-mode control for nonlinear magnetic bearing system. IEEE Trans Control Syst Technol 19(3):636–643
Li S, Zhou M, Yu X (2013) Design and implementation of terminal sliding mode control method for PMSM speed regulation system. IEEE Trans Ind Inf 14(4):1879–1891
Khoo S, Xie L, Man Z (2009) Integral terminal sliding mode cooperative control of multi-robot networks. In: IEEE/ASME international conference on advanced intelligent mechatronics, pp 969–973
Park J, Sandberg IW (1991) Universal approximation using radial basis-function networks. Neural Comput 3(2):246–274
Lewis FL, Yesildirec A, Liu K (1996) Multilayer neural-net robot controller with guaranteed tracking performance. IEEE Trans Neural Netw 7(2):388–399
Isidori A, Asolfi A (1992) Disturbance attenuation and \(H_\infty \)-control via measurement feedback in nonlinear systems. IEEE Trans Automat Contr 37(9):1283–1293
Sastry SS, Bodson M (1989) Adaptive control: stability, convergence, and robustness. Prentice-Hall, Englewood Cliffs
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A Dynamic Model for the Self-Balancing-Train System with 2-Vehicles
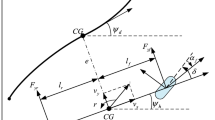
From Fig. 5 and (5), the following is obtained:
where \(\mathbf{q}=[\theta _{w_{_{1}}}\ \theta _{w_{_{2}}}\ \psi _{c_{_{1}}}\ \psi _{c_{_{2}}}]^\top \) is the vector for the generalized coordinates of the free system for which \(\mathbf{C}(\mathbf{q},\dot{\mathbf{q}})=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\mathbf{C}_{_{0}}(\mathbf{q},\dot{\mathbf{q}})\), \(\mathbf{G}(\mathbf{q})=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\mathbf{G}_{_{0}}(\mathbf{q})\), \(\mathbf{K}(\mathbf{q})=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\mathbf{K}'\), \(\mathbf{B}(\mathbf{q})=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\), \(\mathbf{d}=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\mathbf{d}'\), and \(\Delta \mathbf{f}=\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\big (\Delta \mathbf{H}(\mathbf{q})\ddot{\mathbf{q}}+\Delta \mathbf{C}(\mathbf{q},\dot{\mathbf{q}})\dot{\mathbf{q}}+\Delta \mathbf{G}(\mathbf{q})\big )\). Then \(\mathbf{H}_{_{0}}(\mathbf{q})\) is the inertia matrix defined as follows:
where \(h_{_{11}}=2J_{w_{_{1}}}+M_{c_{_{1}}}r^{2}_{_{w}}+2M_{w_{_{1}}}r^{2}_{_{w}}+2J_{m_{_{1}}}\eta ^2\), \(h_{_{13}}=-2J_{m_{_{1}}}\eta ^2+LM_{c_{_{1}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\cos (\alpha )\), \(h_{_{22}}=2J_{w_{_{2}}}+M_{c_{_{2}}}r^{2}_{_{w}}+2M_{w_{_{2}}}r^{2}_{_{w}}+2J_{m_{_{2}}}\eta ^2\), \(h_{_{24}}=-2J_{m_{_{2}}}\eta ^2+LM_{c_{_{2}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\cos (\alpha )\), \(h_{_{31}}=-2J_{m_{_{1}}}\eta ^2+LM_{c_{_{1}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\cos (\alpha )\), \(h_{_{33}}=J_{c_{_{1}}}+2J_{m_{_{1}}}\eta ^{2}+L^2M_{c_{_{1}}}\cos ^{2}(\alpha )\), \(h_{_{42}}=-2J_{m_{_{2}}}\eta ^2+LM_{c_{_{2}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\cos (\alpha )\), \(h_{_{44}}=J_{c_{_{2}}}+2J_{m_{_{2}}}\eta ^{2}+L^2M_{c_{_{2}}}\cos ^{2}(\alpha )\), and \(\mathbf{C}_{_{0}}(\mathbf{q},\dot{\mathbf{q}})\) is the centrifugal and coriolis term and is define as:
for which \(c_{_{13}}=-LM_{c_{_{1}}}r_{_{w}}\cos (\alpha )\sin (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\dot{\psi }_{c_{_{1}}}\) ,\(c_{_{24}}=-LM_{c_{_{2}}}r_{_{w}}\cos (\alpha )\sin (\alpha +\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\dot{\psi }_{c_{_{2}}}\), and \(\mathbf{G}_{_{0}}(\mathbf{q})\) is the gravitational term defined as:
for which \(g_{_{1}}\)=\(g(M_{c_{_{1}}}+2M_{w_{_{1}}})r_{_{w}}\sin (\alpha )\), \(g_{_{2}}\)=\(g(M_{c_{_{2}}}+2M_{w_{_{2}}})r_{_{w}}\sin (\alpha )\), \(g_{_{3}}\)=\(-gLM_{c_{_{1}}}\cos (\alpha )\sin (\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\), \(g_{_{4}}\)=\(-gLM_{c_{_{2}}}\cos (\alpha )\sin (\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\), \(g=9.8m/s^2\) is the gravitational acceleration constant, and \(\mathbf{K}'\) is the stiffness matrix term defined as:
for which \(k_{_{11}}=1\), \(k_{_{12}}=-1\), \(k_{_{21}}=-1\), \(k_{_{22}}=1\), k is the spring constant, and \(\mathbf{u}=[u_{_{1}}\ u_{_{2}}\ 0\ 0]^\top \) is the input vector, where \(u_{_{1}}\) and \(u_{_{2}}\) are the inputs applied to the first vehicle and second vehicle of train system, respectively, and \(\Delta \mathbf{H}(\mathbf{q})\), \(\Delta \mathbf{C}(\mathbf{q},\dot{\mathbf{q}})\), and \(\Delta \mathbf{G}(\mathbf{q})\) are the perturbed parametric matrices defined as follows:
where \(h'_{_{11}}=2J_{w_{_{1}}}+\Delta M_{c_{_{1}}}r^{2}_{_{w}}+2\Delta M_{w_{_{1}}}r^{2}_{_{w}}+2J_{m_{_{1}}}\eta ^2\), \(h'_{_{13}}=-2J_{m_{_{1}}}\eta ^2+L\Delta M_{c_{_{1}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\cos (\alpha )\), \(h'_{_{22}}=2J_{w_{_{2}}}+\Delta M_{c_{_{2}}}r^{2}_{_{w}}+2\Delta M_{w_{_{2}}}r^{2}_{_{w}}+2J_{m_{_{2}}}\eta ^2\), \(h'_{_{24}}=-2J_{m_{_{2}}}\eta ^2+L\Delta M_{c_{_{2}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\cos (\alpha )\), \(h'_{_{31}}=-2J_{m_{_{1}}}\eta ^2+L\Delta M_{c_{_{1}}}r_{_{w}}\cos (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\cos (\alpha )\), \(h'_{_{33}}=J_{c_{_{1}}}+2J_{m_{_{1}}}\eta ^{2}+L^2\Delta M_{c_{_{1}}}\cos ^{2}(\alpha )\), \(h'_{_{44}}=J_{c_{_{2}}}+2J_{m_{_{2}}}\eta ^{2}+L^2\Delta M_{c_{_{2}}}\cos ^{2}(\alpha )\).
where \(c'_{_{13}}=-L\Delta M_{c_{_{1}}}r_{_{w}}\cos (\alpha )\sin (\alpha +\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\dot{\psi }_{c_{_{1}}}\) ,\(c'_{_{24}}=-L\Delta M_{c_{_{2}}}r_{_{w}}\cos (\alpha )\sin (\alpha +\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\dot{\psi }_{c_{_{2}}}\).
for which \(g'_{_{1}}\)=\(g(\Delta M_{c_{_{1}}}+2\Delta M_{w_{_{1}}})r_{_{w}}\sin (\alpha )\), \(g'_{_{2}}\)=\(g(\Delta M_{c_{_{2}}}+2\Delta M_{w_{_{2}}})r_{_{w}}\sin (\alpha )\), \(g'_{_{3}}\)=\(-gL\Delta M_{c_{_{1}}}\cos (\alpha ) \sin (\delta _{c_{_{1}}}+\psi _{c_{_{1}}})\), \(g'_{_{4}}\)=\(-gL\Delta M_{c_{_{2}}}\cos (\alpha )\sin (\delta _{c_{_{2}}}+\psi _{c_{_{2}}})\), respectively.
From (42) and letting \({\varvec{x}}_{_{1}}=\mathbf{q}\), and \({\varvec{x}}_{_{2}}=\dot{\mathbf{q}}\) one gets:
where \({\varvec{x}}_{_{1}}=[x_{_{1}}\ x_{_{3}}\ x_{_{5}}\ x_{_{7}}]^\top =[\theta _{w_{_{1}}}\ \theta _{w_{_{2}}}\ \psi _{c_{_{1}}}\ \psi _{c_{_{2}}}]^\top \) is the rotation angle vector and \({\varvec{x}}_{_{2}}=[x_{_{2}}\ x_{_{4}}\ x_{_{6}}\ x_{_{8}}]^\top =[\dot{\theta }_{w_{_{1}}}\ \dot{\theta }_{w_{_{2}}}\ \dot{\psi }_{c_{_{1}}}\ \dot{\psi }_{c_{_{2}}}]^\top \) is the angular velocity vector.
Appendix B Proof of Lemma 2
Substituting (28), (30), and (31) into (25) one gets:
where \(\tilde{{\varvec{\Lambda }}}=\hat{\varvec{\Lambda }}-{\varvec{\Lambda }}\). From (51), the following is obtained:
where \(\bar{\mathbf{e}}=[\mathbf{e}^\top _{_{1}}\ \mathbf{e}^\top _{_{2}}]^\top \), \({\varvec{\Upsilon }}=\left[ \begin{array}{cc}\mathbf{0}_{(2n)} &{} \mathbf{I}_{(2n)} \\ -\mathbf{I}_{(2n)} &{} -3\mathbf{I}_{(2n)}\end{array}\right] _{(4n)\times (4n)}\), and \(\bar{\mathbf{B}}=\left[ \begin{array}{c}\mathbf{0}_{(2n)} \\ \mathbf{I}_{(2n)}\end{array}\right] _{(4n)\times 2n}\).
In order to achieve the approaching conditions of the sliding mode and guarantee the boundedness of the approximation error of the uncertainties, the Lyapunov function is selected as follows:
From (24), (28), (30), (31), and (52), the time derivative of (53) is
From Assumption 3,
Since
and
and letting \(\lambda _{_{1}}<1\), the following is obtained
From Lemma 1, one gets:
where \(\tilde{\mathbf{e}}^\top =[\bar{\mathbf{e}}^\top \ (\mathbf{e}^{p(t)}_{_{1}})^\top ]\) and \(\bar{\mathbf{Q}}=\left[ \begin{array}{cc}\bar{\mathbf{Q}}_{_{1}} &{} \bar{\mathbf{Q}}_{_{2}}\\ \bar{\mathbf{Q}}^\top _{_{2}} &{} \bar{\mathbf{Q}}_{_{3}}\end{array}\right] >0\) for which \(\bar{\mathbf{Q}}_{_{1}}=\mathbf{Q}-\lambda _{_{1}}\varsigma _{_{1}}\mathbf{P}\bar{\mathbf{B}}\bar{\mathbf{B}}^\top \mathbf{P}\), \(\bar{\mathbf{Q}}_{_{2}}=(1+\lambda _{_{1}})\mathbf{P}\bar{\mathbf{B}}\), and \(\bar{\mathbf{Q}}_{_{3}}=-\frac{\lambda _{_{1}}}{\varsigma _{_{1}}}\mathbf{I}_{(2n)}\). Using Barbalat’s lemma in [40], (60) implies \(\mathbf{s}\rightarrow 0\) and \(\bar{\mathbf{e}}\rightarrow 0\) (\(\mathbf{e}\rightarrow 0\)) as \(t\rightarrow \infty \). This completes the proof. \(\square \)
Appendix C Proof of Theorem 2
Similar to the proof of Lemma 2, where the same Lyapunov function is chosen as in (53). Condition 1:\(|\chi _{_{{l}_{\varphi }}}|>\epsilon \). From (22), (28), (30), (35), (36), (37), then,
From (38), adaptive law (32), Lemma 1, let \(\lambda _{_{2}}<1\), and Assumption 4 (\(\mathbf{s}^\top \big ({\varvec{\gamma }}_{_{3}}-\zeta _{\gamma _{_{3}}}sgn({\varvec{\chi }}_{_{1}})\big )+\big ({\varvec{\gamma }}_{_{3}}-\zeta _{\gamma _{_{3}}}sgn({\varvec{\chi }}_{_{1}})\big )^\top \mathbf{s}\le 0\), \(\bar{\mathbf{e}}^\top \mathbf{P}\bar{\mathbf{B}}\big ({\varvec{\gamma }}_{_{4}}-\zeta _{\gamma _{_{4}}}sgn({\varvec{\chi }}_{_{2}})\big )+\big ({\varvec{\gamma }}_{_{4}}-\zeta _{\gamma _{_{4}}}sgn({\varvec{\chi }}_{_{2}})\big )^\top \bar{\mathbf{B}}^\top \mathbf{P}\bar{\mathbf{e}}\le 0\)) one gets:
where \(\bar{\mathbf{s}}^\top =[\mathbf{s}^\top \ \bar{\mathbf{e}}^\top ]^\top \), \(\mathbf{E}=\frac{2}{\rho ^2}\bar{\mathbf{B}}^\top \mathbf{P}+\frac{1}{2}\varpi \bar{\mathbf{B}}^\top \mathbf{P}\), and \(\bar{\mathbf{E}}=\left[ \begin{array}{cc}\varpi \mathbf{I}_{(2n)} &{} \mathbf{E}\\ \mathbf{E}^\top &{} 800\mathbf{I}_{(4n)}\end{array}\right] >0\). Since \(\bar{\mathbf{s}}^\top \bar{\mathbf{s}}=\mathbf{s}^\top \mathbf{s}+\bar{\mathbf{e}}^\top \bar{\mathbf{e}}\ge \bar{\mathbf{e}}^\top \bar{\mathbf{e}}\), we have \(-\lambda _{max}(\bar{\mathbf{E}})\bar{\mathbf{s}}^\top \bar{\mathbf{s}}\le -\lambda _{max}(\bar{\mathbf{E}})\bar{\mathbf{e}}^\top \bar{\mathbf{e}}\) for which \(\lambda _{max}(\bar{\mathbf{E}})\) denotes the maximum eigenvalue of \(\bar{\mathbf{E}}\). Hence, (62) can be rewritten as
where \(\bar{\mathbf{N}}=\left[ \begin{array}{cc}\bar{\mathbf{N}}_{_{1}} &{} \bar{\mathbf{N}}_{_{2}}\\ \bar{\mathbf{N}}^\top _{_{2}} &{} \bar{\mathbf{N}}_{_{3}}\end{array}\right] >0\) for which \(\bar{\mathbf{N}}_{_{1}}=\mathbf{Q}+\lambda _{max}(\bar{\mathbf{E}})\mathbf{I}_{(4n)}-800\mathbf{I}_{(4n)}-\lambda _{_{2}}\varsigma _{_{2}}\mathbf{P}\bar{\mathbf{B}}\bar{\mathbf{B}}^\top \mathbf{P}\), \(\bar{\mathbf{N}}_{_{2}}=(1+\lambda _{_{2}})\mathbf{P}\bar{\mathbf{B}}\), and \(\bar{\mathbf{N}}_{_{3}}=-\frac{\lambda _{_{2}}}{\varsigma _{_{2}}}\mathbf{I}_{(2n)}\). Since \(\mathbf{H}_{_{0}}(\mathbf{q})\) is nonsingular, \(\forall \mathbf{q}\), and then \(\mathbf{H}_{_{0}}(\mathbf{q})^{-1}\) is bounded, thus, \(\mathbf{d}=\mathbf{M}_{_{0}}(\mathbf{q})^{-1}\mathbf{d}'\) is also bounded and so is \(\Vert \mathbf{d}\Vert \). Therefore, from (63), the following is obtained:
where \(\lambda _{min}(\bar{\mathbf{N}})\) denotes the minimal eigenvalue of \(\bar{\mathbf{N}}\). Therefore, whenever
\(\dot{V}(t)\le 0\). In light of the Lyapunov stability theory of the retarded functional differential equation, since \(\rho \) is the design constant serving as an attenuation level, it can be concluded from (63) that for any \(t\ge t_0\), \(\bar{\mathbf{e}}\) and \(\tilde{\varvec{\Lambda }}\) are UUB in the presence of the external disturbance \(\mathbf{d}(t)\). Assuming \(\mathbf{d}(t) \in L_2[0,T]\), \(\forall T \in [0,\infty )\) and since \(V(T)\ge 0\), integrating (63) from \(t=0\) to \(t=T\) leads to:
Substituting (53) into (66), for the \(H_\infty \) tracking performance J is given by:
Condition 2: If \(|\chi _{_{{l}_{\varphi }}}|\le \epsilon \). From (61),
It follows from the above proof and from (38), adaptive law (32), Lemma 1, for \(\lambda _{_{2}}<1\), and Assumption 5 (\(\mathbf{s}^\top \big ({\varvec{\gamma }}_{_{5}}-(\zeta _{\gamma _{_{3}}}/\epsilon ){\varvec{\chi }}_{_{1}}\big )+\big ({\varvec{\gamma }}_{_{5}}-(\zeta _{\gamma _{_{3}}}/\epsilon ){\varvec{\chi }}_{_{1}}\big )^\top \mathbf{s}\le 0\) and \(\bar{\mathbf{e}}^\top \mathbf{P}\bar{\mathbf{B}}\big ({\varvec{\gamma }}_{_{6}}-(\zeta _{\gamma _{_{4}}}/\epsilon ){\varvec{\chi }}_{_{2}}\big )+\big ({\varvec{\gamma }}_{_{6}}-(\zeta _{\gamma _{_{4}}}/\epsilon ){\varvec{\chi }}_{_{2}}\big )^\top \bar{\mathbf{B}}^\top \mathbf{P}\bar{\mathbf{e}}\le 0\)) the same results can be obtained. Hence, the \(H_\infty \) tracking performance satisfies
This completes the proof. \(\square \)
Rights and permissions
About this article

Cite this article
Karkoub, M., Weng, CC., Wu, TS. et al. \(H_\infty \) tracking adaptive fuzzy integral sliding mode control for a train of self-balancing vehicles. Int. J. Dynam. Control 7, 644–678 (2019). https://doi.org/10.1007/s40435-018-0465-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40435-018-0465-4