
Abstract
Estimation of 3D motion in a dynamic scene from a temporal pair of images is a core task in many scene understanding problems. In real-world applications, a dynamic scene is commonly captured by a moving camera (i.e., panning, tilting or hand-held), increasing the task complexity because the scene is observed from different viewpoints. The primary challenge is the disambiguation of the camera motion from scene motion, which becomes more difficult as the amount of rigidity observed decreases, even with successful estimation of 2D image correspondences. Compared to other state-of-the-art 3D scene flow estimation methods, in this paper, we propose to learn the rigidity of a scene in a supervised manner from an extensive collection of dynamic scene data, and directly infer a rigidity mask from two sequential images with depths. With the learned network, we show how we can effectively estimate camera motion and projected scene flow using computed 2D optical flow and the inferred rigidity mask. For training and testing the rigidity network, we also provide a new semi-synthetic dynamic scene dataset (synthetic foreground objects with a real background) and an evaluation split that accounts for the percentage of observed non-rigid pixels. Through our evaluation, we show the proposed framework outperforms current state-of-the-art scene flow estimation methods in challenging dynamic scenes.
Z. Lv—This work started during an internship that the author did at NVIDIA.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
The estimation of 3D motion from images is a fundamental computer vision problem, and key to many applications such as robot manipulation [3], dynamic scene reconstruction [14, 23], autonomous driving [8, 27, 29, 44], action recognition [43], and video analysis [13]. This task is commonly referred as 3D motion field or scene flow estimation. 3D motion field estimation in a dynamic environment is, however, a challenging and still open problem when the scene is observed from different view points and the amount of coverage of moving objects in each image is significant. This is mainly because the disambiguation of camera motion (ego-motion) from object motion requires the correct identification of rigid static structure of a scene. Unlike other methods solving the problem with piecewise rigid motion [9, 19, 41], clustering local motions [16], and semantic segmentation [32, 45], our network can infer per-pixel rigidity by jointly learning rigidity and the relative camera transform from large-scale dynamic scene data. A brief example of our results is shown in Fig. 1.

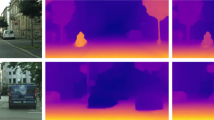
Our estimated rigidity (b), Ego-motion Flow (c) and Projected scene flow (d) (bottom row) compared to the ground truth (top row). The rigidity mask allows us to solve for the relative camera transform and compute the 3D motion field given the optical flow.
Our framework, shown in Fig. 2, takes a sequential image pair with color and depth (RGBD) as the input and mainly focuses on dynamic scenes with a moving camera (e.g., panning), where camera motion and objects motions are entangled in each observation. To solve for 2D correspondences, our framework relies on 2D optical flow, and is not tied to any particular algorithm. We use the method by Sun et al. [33], which we evaluate together with the rigidity network to estimate both ego-motion and scene-motions. The network that learns the per-pixel rigidity also solves for the relative camera pose between two images, and we can accurately refine the pose as a least square problem with the learned dense flow correspondences and rigidity region. To provide better supervision during training and encourage generalization, we develop a tool and methodology that enables the creation of a scalable semi-synthetic RGB-D dynamic scene dataset, which we call REFRESH. This dataset combines real-world static rigid background with non-rigid synthetic human motions [36] and provides ground truth color, depth, rigidity, optical flow and camera pose.
In summary, our major contributions are:
-
1.
A learning-based rigidity and pose estimation algorithm for dynamic scenes with a moving camera.
-
2.
An RGBD 3D motion field estimation framework that builds on inference from rigidity, pose, and existing 2D optical flow, which outperforms the state-of-the-art methods.
-
3.
A new semi-synthetic dynamic scene data and its creation tool: REal 3D From REconstruction with Synthetic Humans (REFRESH).

An overview of our proposed inference architecture for 3D motion field estimation. Our method takes two RGB-D frames as inputs independently processed by two networks. The Rigidity Transform Network (RTN) estimates the relative camera transform and rigid/non-rigid regions. The flow network [33] computes dense flow correspondences. We further refine the relative pose with dense flow over the rigid region. With the refined pose, we compute 3D motion field and projected scene flow from the egomotion flow.
2 Related Work
Scene Flow: Scene flow estimation in dynamic scenes brings together fundamental computer vision algorithms in optical flow, and pose estimation of camera and objects. Vedula et al. [37] defined the 3D motion field as scene flow, and proposed a method to compute dense non-rigid 3D motion fields from a fixed multi-view set-up. Its extension to a moving camera case needs to disambiguate the camera ego-motion from object scene motions in 3D. Due to the intrinsic complexity of such task, existing methods often address it with known camera parameters [1, 35] or assume scene motions are piecewise rigid [9, 19, 21, 39, 40, 42]. When depth is known, scene flow can be more accurately estimated. Quiroga et al. estimates RGB-D scene flow as a rigid flow composited with a non-rigid 6DoF transforms [25]. Sun et al. estimates scene flow as a composition of finite rigid moving objects [32]. Jaimez et al. separately solve rigid region as visual odometry and non-rigid regions as moving clustered patches conditioned on rigidity segmentation [16]. They solve the rigidity segmentation based on the robust residuals of two frame alignment, similar to [18, 23] for camera tracking in dynamic environments. All of these approaches use rigidity as a prior, but can fail as the complexity of the dynamic scene increases. None of these methods use learned models. We show that the 3D motion field can be more accurately estimated using learned models for rigidity and optical flow.
Learning Camera Transform and Rigidity: Recently, various learning-based methods have been introduced for the joint estimation of camera transform and depth (or rigid structure) [34, 38, 49], and rigid motion tracking [3]. Most of them assume that the scene is either static [34], quasi-static (scene motions are minimal and can be dealt as outliers) [49], or that the camera remains static when a rigid scene motion occurs [3]. More recently, a few approaches [45, 47] demonstrated the importance of learning rigidity to handle dynamic scenes. Wulff et al. [45] assume the rigidity can be learned by finetuning the semantic segmentation network from a single image, while we posit that rigidity correlates spatially to the epipolar geometry. Yin and Shi [47] unsupervised learn the non-rigid flow residual in the 3D urban scene. We are interested in more general dynamic scenes with unconstrained scene motions observed from moving cameras, and we address this by directly learning the per-pixel rigidity in the supervised manner which can generalize to unseen scenes.
3 Rigidity, Scene Flow and Moving Camera
We focus on solving for the 3D motion field in the physical scene observed from a moving camera, commonly termed as scene flow [16, 37]. Here we define the relationship between 2D image correspondences and scene flow in physical 3D scenes with object motions and camera motion derived from relative camera poses between two temporal views.

The geometry of two-frame scene flow, where the camera moves from \(I_0\) to \(I_1\), and point \(\mathbf {x}_0\) moves to \(\mathbf {x}_1\) (green circles), and their projections in the two images are shown as \(\mathbf {u}_0, \mathbf {u}_1\) respectively (red circles). Note that \(\mathbf {u}_0'\) is a projected location of \(\mathbf {x}_0\) in \(I_1\), as if \(\mathbf {x_0}\) were observed by \(I_1\), and can be computed by camera motion as \(\delta \mathbf {u}_{{0}\rightarrow {1}}^{cm}\), and \(\mathbf {u}_0\) in \(I_1\) is visualizing the pixel location it had in \(I_0\). If the camera was static and observed both \(\mathbf {x_0}\) and \(\mathbf {x_1}\) at the position of \(I_1\), optical flow \(\delta \mathbf {u}_{{0}\rightarrow {1}}^{of}\) would be same to a projected scene flow \(\delta \mathbf {u}_{{0}\rightarrow {1}}^{sf_1}\). The right image shows each flow in \(I_1\) of dynamic scene under camera panning. (Color figure online)
Let \(\mathbf {x}_t\in \mathbb {R}^3\) be the location of a point \(\mathbf {x}\) on a non-rigid surface \(\varOmega _t\) of a moving object with respect to a fixed world coordinate system at time t. We define \(\delta \mathbf {x}_{{t} \rightarrow {t+1}}\) as the 3D motion vector of \(\mathbf {x}\) from time t to time \(t+1\), also referred as scene flow in this paper. When \(\mathbf {x}_t\) is observed by a camera with known intrinsics, we define \(\pi (\mathbf {x}_t)\) to be the projection of \(\mathbf {x}_t\) to image coordinates \(\mathbf {u}_t\), and \(\pi ^{-1}(\mathbf {u}_t, z_t)\) the inverse projection into 3D camera coordinates given the known depth \(z_t\) in the camera reference frame.
Scene flow, 2D Optical Flow, and Camera Pose Optical flow offers direct 2D associations of measurements in \(I_{t}\) and \(I_{t+1}\). Suppose \(\mathcal {C}_{t}\) is the known camera extrinsics matrix for \(I_{t}\), then the optical flow \(\delta \mathbf {u}_{{t}\rightarrow {t+1}}\) from \(I_{t}\) to \(I_{t+1}\) can be defined as follows:
Equation 1 states the two-view geometric relationship between 2D optical flow and 3D scene flow. We can simplify it by considering the camera’s relative motion from \(I_0\) to \(I_1\), i.e. assuming \(t=0\) and setting \(\mathcal {C}_{0}\) to identity:
Given the optical flow \(\delta \mathbf {u}_{{0}\rightarrow {1}}^{of}\) and the depth from the RGBD data, the 3D scene flow vector can be computed as:
Note that \(\mathcal {C}_{1}\) can be computed from 2D correspondences that follow two-view epipolar geometry [11], and the corresponding points should lie on the rigid and static background structure. This is especially challenging when the scene contains dynamic components (moving objects) as well as a rigid and stationary background structure. As such, identifying inliers and outliers using rigidity is a key element for successful relative camera pose estimation, and thus is necessary to achieve reaching accurate scene flow estimation in a dynamic scene [16], which we will discuss in Sect. 4.
Egomotion Flow from a Moving Camera in a Static Scene: When an observed \(\mathbf {x}\) in a scene remains static between the two frames, \(\delta \mathbf {x}_{{0} \rightarrow {1}} = \mathbf {0}\) and therefore \(\mathbf {x}_{1} = \mathbf {x}_{0}\). Then, the observed optical flow is purely induced by the camera motion and we refer it as a camera egomotion flow:
Projected Scene Flow and Rigidity: As described in Fig. 3, the projected scene flow is a projection of a 3D scene flow \(\delta \mathbf {x}_{{0} \rightarrow {1}}\) in \(I_1\) if \(\mathbf {x}_0\) was observed from \(I_1\), which can be computed from camera ego-motion and optical flow:
The projected scene flow (in a novel view) is also referred as non-rigid residual [25, 47]. All locations with zero values in projected scene flow indicate the rigidity region in ground truth data. As demonstrated in Fig. 3, the projected scene flow is a useful tool to evaluate the results of dense scene flow estimation in the 2D domain which requires accurate estimation of both camera pose and optical flow. Thus, we use it as the evaluation metric in Sect. 6.
4 3D Motion Field Estimation Pipeline
We introduce a framework that refines the relative camera transform and the optical flow with a rigidity mask for accurate scene flow estimation. Figure 2 shows the overview of our proposed pipeline. Given a temporal pair of RGB-D images, we concurrently run the optical flow and rigidity-transform network. The optical flow network [33] offers the 2D correspondence association between frames, and our proposed rigidity-transform network provides an estimate of the camera transform and the rigidity mask.
4.1 Rigidity-Transform Network
Previous work on camera pose estimation using CNNs focused on either static or quasi-static scenes, where scene motions are absent or their amount is minimal [34, 38, 49]. In dynamic scenes with a moving camera, camera pose estimation can be challenging due to the ambiguity induced by the camera motion and scene (object) motion. Although existing approaches leverage prior information in motion or semantic knowledge [16, 25, 28, 32] to disambiguate the two, the priors are usually not general for different scenes.
We propose to infer the rigidity from epipolar geometry by a fully-convolutional network that jointly learns camera motion and segmentation of the scene into dynamic and static regions from RGB-D inputs. We represent this rigidity segmentation as a binary mask with the static scene masked as rigid. The rigid scene components will obey the rigid transform constraints induced by the camera ego-motion and serve as the regions of attention of the camera transform. We name it rigidity-transform network (RTN), shown in Fig. 4.

Rigidity-Transform network (RTN) architecture The inputs to the RTN are 12 channel tensors encoded with \([(u-c_x)/f_x,(v-c_y)/f_y,1/d,r,g,b]\) computed from a pair of RGB-D images and their intrinsics. It is a fully convolutional encoder-decoder architecture predicting pose as a translation and euler angles, and scene rigidity as a binary mask.
RTN: Given a pair of RGB-D frames, we pre-process each frame into a 6 channel tensor \([(u-c_x)/f_x,(v-c_y)/f_y,1/d,r,g,b]\), from camera intrinsic parameters \([f_x,f_y, c_x,c_y]\) and the depth d. Due to the range of depth values, this representation is numerical stable in training and delivers good generalization performance. We truncate 1 / d to the range \([1e-4, 10]\), which can cover scenes of various scales. We concatenate the two-frame tensors to a 12-channel tensor as input to our network. The network is composed of an encoder followed by pose regression and a decoder followed by the rigidity segmentation.
Encoder: We use five stride-2 conv-layers which gradually reduce spatial resolution and one stride-1 convolution as the conv-6 layer. Each convolution is followed by a batchnorm and ReLU layer. In the bottleneck layer, the target is to predict the camera relative translation \(\mathbf {t}\) and rotation \(\varTheta \). After the conv-6 layer, we use a spatial-average pooling (SAP) to reduce the feature into a 1024D vector. With two \(1\times 1\) convolution layers that output 3 channels, we separately estimate the \(\mathbf {t}\) and \(\varTheta \). We assume the relative camera transformation between two frames is small and thus we represent the rotation \(\mathbf {R}(\alpha , \beta , \gamma )=\mathbf {R}_{x}(\alpha )\mathbf {R}_{y}(\beta )\mathbf {R}_{z}(\gamma )\) with Euler angles \(\varTheta =[\alpha , \beta , \gamma ]\). The regression loss is a weighted combination of the robust Huber loss \(\rho ({\cdot })\) for translation and rotation as:
Decoder: The decoder network is composed of five deconvolution (transpose convolution) layers which gradually upsample the conv-6 feature into input image scale and reshape it into the original image resolution. We estimate the rigidity attention as a binary segmentation problem with binary cross-entropy loss \( \mathcal {L}_{r}\). The overall loss is a weighted sum of both loss functions: \(\mathcal {L}_{c} = w_{p} \mathcal {L}_{p} + \mathcal {L}_{r}\).
Enforcing Learning from Two Views: We enforce the network to capture both scene structures and epipolar constraints using two views rather than a single-view short-cut. First, our network is fully convolutional, and we regress the camera pose from the SAP layer which preserves feature distributions spatially. Features for rigidity segmentation and pose regression can interact directly with each other spatially across each feature map. We do not use any skip layer connections. Our experiments in Sect. 6 show that joint learning of camera pose and rigidity can help RTN to achieve better generalization in complex scenes. Second, we randomly use two identical views as input, and a fully rigid mask as output with 20% probability during data augmentation, which prevents the network from only using a single view for its prediction.
4.2 Pose Refinement from Rigidity and Flow
To solve for the 3D motion field accurately from two views from Eq. 3, we require a precise camera transformation. Moreover, the pose output from RTN may not always precisely generalize to new test scenes. To overcome this, we propose a refinement step based on the estimated rigidity B and bidirectional dense optical flow \(\delta \mathbf {u}_{{0}\rightarrow {1}}^{of}\) and \(\delta \mathbf {u}_{{1}\rightarrow {0}}^{of}\) (with forward and backward pass). We view the estimation of \(\mathcal {C}_{1}\) as a robust least square problem as:
where \(\mathbf {x}_i = \pi ^{-1}(\mathbf {u}_i, z_i)\) in all background regions B, predicted by the RTN. \([\mathbf {I}]\) is an Iverson bracket for all the inlier correspondences. We filter the inlier correspondences in several steps. We first use forward-backward consistency check for bidirectional optical flow with a threshold of 0.75 to remove all flow correspondences which are not consistent. The removed region approximates the occlusion map O. We use a morphological operator with patch size 10 to dilate B and O to further remove the outliers on boundaries. From all correspondences, we uniformly sample bidirectional flow correspondences with a stride of 4 and select 1e4 points among them that are closest to the camera viewpoint. These help to solves the optimization more efficiently and numerically stable. We also use the Huber norm \(\rho (\cdot )\) as a robust way to handle the remaining outliers. We solve Eq. 7 efficiently via Gauss-Newton with \(\mathcal {C}_{1}\) initialized from the RTN output. Note that in most cases correspondences are mostly accurate, the initialization step trivially helps but can also be replaced by an identity initialization.
5 REFRESH Dataset
Training our network requires a sufficient amount of dynamic RGB-D images over scenes and ground truth in the form of known camera pose, rigidity mask, and optical flow. However, acquiring such ground truth from the real-world data is difficult or even infeasible. Existing dataset acquisition tools include rendered animations like SINTEL [2] and Monka [20], and frames captured from games [26]. SINTEL [2] has a small number of frames, so we use it for testing instead of training. Most approaches render scenes using rigid 3D object models [7, 20, 31] with the concept. Among all existing tools and datasets, only Things3D [20] provides sufficient 3D training samples for learning 3D flow with moving camera ground truth. However, it only uses a small set of 3D objects with textured images at infinity as static scene context and rigid objects as the dynamic scene, which does not provide realistic 3D scene structure for motion estimation that can generalize well.

REFRESH dataset creation pipeline With a captured RGB-D trajectory, the scene is reconstructed as a 3D mesh by BundleFusion [5] (a), with raw RGB-D input as (b) and (c). With sampled frames from the camera trajectory, we load synthetic human models [36] with motions randomly into the 3D as (d), and render the rigidity mask (e), Finally we composite the rendered synthetic ground truth with its corresponding rendered 3D views and the final semi-synthetic RGB-D views (f) and (h), with optical flow ground truth as (i).
To overcome the dataset issue, we propose a semi-synthetic scene flow dataset: REal 3D from REconstruction with Synthetic Humans, which we name as REFRESH. For this task we leverage the success of state of the art 3D reconstruction systems [5, 10, 46], which directly provide dense 3D meshes and optimized camera trajectories. We use a pre-captured RGB-D dataset and create dynamic 4D scenes by rendering non-rigid 3D moving objects with pre-defined trajectories. We overlay synthetic objects over the original footage to obtain a composite image with the ground truth as shown in Fig. 5.
Real 3D Reconstructed Scenes: We use the 3D meshes created with BundleFusion [5]. The authors released eight reference 3D meshes with the 25 K input RGB-D images, camera intrinsic and extrinsic parameters.
Synthetic Humans: We create non-rigid scene elements with the method introduced in SURREAL [36]. Each synthetic body is created from realistic articulated human body models [17] and pose actions are from the CMU MoCap database [15] with more than 20 K sequences of 23 action categories. The human textures are composed of SMPL CAESAR scans and real clothing registered with 4Cap [24]. We create each synthetic human with random gender, body shape, cloth texture, action and their positions in the 3D scene which guarantees the diversity of dynamic scenes. We control the visibility of human models along the trajectory by putting the pelvis point of each human model in the free space w.r.t. the ego-centric viewpoint from a selected frame along the trajectory. The free space is sampled by the corresponding depth. For every 100 frames, we select n frames (n sample from \(\sim \mathcal {N}(15, 5)\)) and insert n human models into the scene.
Rendering and Ground-Truth Generation: We use Cycles from the BlenderFootnote 1 suite as our rendering engine. The lighting is created using spherical harmonics, as in Varol et al. [36]. First, we set the virtual camera using the same 3D scene camera intrinsic and spatial resolution. The camera extrinsic follows the real-data trajectory (computed from BundleFusion [5]). Thus, we can use the raw color image rather than rendered image as background texture which is photo-realistic and contains artifacts such as motion blur. With the same camera settings, we separately render the 3D reconstructed static mesh and the synthetic humans, and composite them using alpha-matting. Different from the color image, the depth map is rendered from the 3D mesh, which is less noisy and more complete than raw depth. Since the camera movement during the 3D acquisition is small between frames, we sub-sample frames at intervals of [1,2,5,10,20] to create larger motions. We employ a multi-pass rendering approach to generate depth, optical flow and rigidity mask as our ground truth.
6 Experiments
We implemented the RTN in PyTorch, and the pose refinement in C++ with GTSAM 4.0 [6]. The PWCNet [33] is trained in Caffe. We integrate all the modules through Python. We use 68 K images from our REFRESH dataset for trainingFootnote 2. We train RTN from scratch using weight initialization from He et al. [12] and Adam optimizer (\(\beta _1 = 0.9\) and \( \beta _2 = 0.999\), learning rate of \(2e^{-4}\)) on 3 GPUs for 12 epochs. During training, the rigidity mask loss is accumulated over 5 different scales with balanced weights, and we choose \(w_{\varTheta }=100\). We follow the same training as PWC-net Sun et al. [33]. We will release our code, datasets and REFRESH toolkitFootnote 3.
We evaluate our approach under various settings to show the performance of rigidity and pose estimation and their influence on scene flow estimation. For the effective analysis in scenes with different levels of non-rigid motions, we create a new test split from SINTEL data [2] based on the non-rigid number of pixels percentage. In Sect. 6.1, we provide a comparison of the performance with different settings for RTN, refinement and other state-of-the-arts methods. In Sect. 6.2, we qualitative evaluate of our method using real world images. Please also refer to our video for more qualitative evaluations.

6.1 Quantitative Evaluations
We first evaluate our approach on the challenging SINTEL dataset [2], which is a 3D rendered animation containing a sequence of 23 dynamic scenes with cinematic camera motion. The dataset has two versions with different rendering settings: clean and final. The latter set contains motion blur and depth of field effects, which are not present in the clean set. Since the official SINTEL test dataset does not provide RGB-D 3D flow evaluation, we split the SINTEL training set into train, validation, and test split. For the test split, to effectively evaluate and analyze the impact of different levels of non-rigid motions in the estimation, we choose alley_2(1.8%), temp_2(5.8%), market_5(27.04%), ambush_6(38.96%), cave_4(47.10%), where \((\cdot )\) indicates the average non-rigid regions in each scene sequence. These examples also contain a sufficient amount of camera motion. We use the first 5 frames in the rest of the 18 scenes as a validation set, and the remaining images for training in our finetuning setting.
We show our quantitative evaluations using flow metric in Table 1, relative pose metric in Table 2, and the rigidity IOU in Table 3. We list the end-point-error (EPE) in the ego-motion flow (EF) and projected scene flow (PSF) as defined in Sect. 3. Our proposed metrics overcomes the traditional difficulty of 3D motion flow evaluation. We compare our method to two state-of-art optimization-based RGB-D scene flow solutions: SRSF [25] and VO-SF [16] which estimate the camera pose as part of the solution to flow correspondence. In addition, we evaluate three types of baselines. The first one solves the refinement stage from flow without any inputs from RTN (Refine Only), which assumes rigidity often dominates the scene [16, 18, 23]. Secondly, we use three-point RANSAC to calculate the camera pose from the flow. Third, to fairly evaluate the rigidity of (RTN) and its generalization, we compare it to semantic rigidity estimation [45], which assumes that the non-rigid motion can be predicted from its semantic labeling. We follow Wulff et al. [45] and use the DeepLab [4] architecture initialized from the pre-trained MS-COCO model, but trained over the same data we used for our model. In the pose refinement stage, we substitute our rigidity from RTN with the semantic rigidity. For the fine-tuned evaluation on SINTEL, we re-train both our RTN and the semantic rigidity network. All methods use the same optical flow network and weights, and all use the same depth from SINTEL ground truth. The qualitative comparison is shown in Fig. 6.
The Flow Metrics in Table 1 show that: (1) compared to SRSF [25] and VOSF [16], our proposed algorithm with learned rigidity can improve scene flow accuracy by a significant margin with no further fine-tuning (NO FT) (rows (a),(b)vs(h); (k),(l)vs(r)); (2) the rigidity mask from our RTN performs better than the single-view semantic segmentation based approach [45], particularly in the more realistic final pass with no fine-tuning (row (d)vs(g),(h); (n)vs(q),(r)); (3) as shown in RTN+refine, the simultaneous learning of rigidity with pose transform achieves better generalization than learning rigidity alone (row (g)vs(h); (q)vs(r)); (4) RTN trained on our dataset generalizes better compared to the same RTN trained using Things3D [20] (row (f)vs(h); (p)vs(r)); and (5) the final approaches consistently outperforms all baselines. Note that the semantic rigidity [45] can achieve better performance (from Table 1) relying on fine-tuning on SINTEL, our learned rigidity can generalize to unseen complex scenes and perform as well as the fine-tuned model. Our rigidity prediction can capture unseen objects well, as shown by the dragon in Fig. 6.
The Pose Metrics evaluations in Table 2 include two other baselines: depth-based ORB-SLAM [22] and point cloud registration [48]. As mentioned, the accuracy of all relevant methods in dynamic scenes with moving camera highly relies on the ability ignore the non-rigid surfaces. As shown in the table, our pose directly predicted from RTN can achieve same or better accuracy with all relevant methods, and our final solution without fine-tunning can out-perform all state-of-the-art methods by a significant margin.
The Rigidity Metric in Table 3 further shows the generalization in rigidity estimation. Our approach trained on our dataset generalizes significant better compared to the same approach trained using Things3D [20] and the semantic rigidity [45] using the same data.
6.2 Evaluation on Real-World Images
To test our algorithm in real-world dynamic scenarios, we use three TUM RGB-D sequences [30] which contains dynamic motions observed from a moving Kinect camera. The depth input is noisy with missing observations and the color images contain severe motion blur. We use the raw color and depth input with provided calibrated camera intrinsics as input, and mark the regions as invalid region when the depth value is not within [0.1, 8]. In invalid regions, we ignore the rigidity prediction and treat the flow correspondence as outliers. Considering there is no 3D motion flow ground truth for our real data, we visualize the rigidity prediction and projected scene flow to qualitatively show the performance in Fig. 7. Our results show that our trained model on semi-synthetic data can also generalize well to real noisy RGB-D data with significant motion blur.

Qualitative visualization of dynamic sequences in TUM [30] sequences.
7 Conclusion and Future Work
We have presented a learning-based approach to estimate the rigid regions in dynamic scenes observed by a moving camera. Furthermore, we have shown that our framework can accurately compute the 3D motion field (scene flow), and the relative camera transform between two views. To provide better supervision to the rigidity learning task and encourage the generalization of our model, we created a novel semi-synthetic dynamic scene dataset, REFRESH, which contains real-world background scenes together with synthetic foreground moving objects. Through various tests, we have shown that our proposed method can outperform state-of-the-art solutions. We also included a new guideline for dynamic scene evaluation regarding the amount of scene motion and camera motion.
We observed some cases where the rigidity mask deviates from the ground-truth. We noticed that in these situations the moving object size is small, or the temporal motions between the two frames are small. In these cases, the error and deviations scales are small, which does not significantly affect the 3D scene flow computed as a result. Note that the success of this method also depends on the accuracy of optical flow. In scenarios when the optical flow fails or produces a noisy result, the errors in the correspondences will also propagate to 3D motion field. In future work, we can address these problems by exploiting rendering more diverse datasets to encourage generalization in different scenes. We will also incorporate both rigidity and optical flow to refine the correspondence estimation and explore performance improvements with end-to-end learning, including correspondence refinement and depth estimation from RGB inputs.
Notes
- 1.
Blender: https://www.blender.org/.
- 2.
More details about the dataset are included in the supplementary materials.
- 3.
Code repository: https://github.com/NVlabs/learningrigidity.git.
References
Basha, T., Moses, Y., Kiryati, N.: Multi-view scene flow estimation: a view centered variational approach. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 1506–1513 (2010)
Butler, D.J., Wulff, J., Stanley, G.B., Black, M.J.: A naturalistic open source movie for optical flow evaluation. In: Fitzgibbon, A., Lazebnik, S., Perona, P., Sato, Y., Schmid, C. (eds.) ECCV 2012. LNCS, vol. 7577, pp. 611–625. Springer, Heidelberg (2012). https://doi.org/10.1007/978-3-642-33783-3_44
Byravan, A., Fox, D.: SE3-nets: learning rigid body motion using deep neural networks. In: IEEE International Conference on Robotics and Automation (ICRA), pp. 173–180. IEEE (2017)
Chen, L.C., Papandreou, G., Kokkinos, I., Murphy, K., Yuille, A.L.: DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs. arXiv:1606.00915 (2016)
Dai, A., Nießner, M., Zollöfer, M., Izadi, S., Theobalt, C.: BundleFusion: real-time globally consistent 3D reconstruction using on-the-fly surface re-integration. ACM Trans. Graph. (TOG) (2017)
Dellaert, F.: Factor graphs and GTSAM: a hands-on introduction. Technical report, GT-RIM-CP&R-2012-002, GT RIM, September 2012. https://research.cc.gatech.edu/borg/sites/edu.borg/files/downloads/gtsam.pdf
Dosovitskiy, A., et al.: FlowNet: learning optical flow with convolutional networks. In: International Conference on Computer Vision (ICCV), pp. 2758–2766 (2015)
Geiger, A., Lauer, M., Wojek, C., Stiller, C., Urtasun, R.: 3D traffic scene understanding from movable platforms. IEEE Trans. Pattern Anal. Mach. Intell. 36, 1012–1025 (2014)
Golyanik, V., Kim, K., Maier, R., Nießner, M., Stricker, D., Kautz, J.: Multiframe scene flow with piecewise rigid motion. In: International Conference on 3D Vision, Qingdao, China, October 2017
Handa, A., Whelan, T., McDonald, J., Davison, A.: A benchmark for RGB-D visual odometry, 3D reconstruction and SLAM. In: IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, May 2014
Hartley, R.I., Zisserman, A.: Multiple View Geometry in Computer Vision, 2nd edn. Cambridge University Press, Cambridge (2004). ISBN 0521540518
He, K., Zhang, X., Ren, S., Sun, J.: Delving deep into rectifiers: surpassing human-level performance on imagenet classification. In: Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), pp. 1026–1034. IEEE Computer Society (2015). https://doi.org/10.1109/ICCV.2015.123
Hung, C.H., Xu, L., Jia, J.Y.: Consistent binocular depth and scene flow with chained temporal profiles. Int. J. Comput. Vis. 102(1–3), 271–292 (2013)
Innmann, M., Zollhöfer, M., Nießner, M., Theobalt, C., Stamminger, M.: VolumeDeform: real-time volumetric non-rigid reconstruction. In: Leibe, B., Matas, J., Sebe, N., Welling, M. (eds.) ECCV 2016. LNCS, vol. 9912, pp. 362–379. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46484-8_22
Ionescu, C., Papava, D., Olaru, V., Sminchisescu, C.: Human3.6M: large scale datasets and predictive methods for 3D human sensing in natural environments. IEEE Trans. Pattern Anal. Mach. Intell. 36(7), 1325–1339 (2014)
Jaimez, M., Kerl, C., Gonzalez-Jimenez, J., Cremers, D.: Fast odometry and scene flow from RGB-D cameras based on geometric clustering. In: IEEE International Conference on Robotics and Automation (ICRA) (2017)
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., Black, M.J.: SMPL: a skinned multi-person linear model. SIGGRAPH Asia 34(6), 248:1–248:16 (2015)
Lv, Z.: KinfuSeg: a dynamic SLAM approach based on kinect fusion. Master’s thesis, Imperial College London (2013)
Lv, Z., Beall, C., Alcantarilla, P.F., Li, F., Kira, Z., Dellaert, F.: A continuous optimization approach for efficient and accurate scene flow. In: Leibe, B., Matas, J., Sebe, N., Welling, M. (eds.) ECCV 2016. LNCS, vol. 9912, pp. 757–773. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46484-8_46
Mayer, N., et al.: A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 4040–4048 (2016)
Menze, M., Geiger, A.: Object scene flow for autonomous vehicles. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 3061–3070 (2015)
Mur-Artal, R., Tardós, J.D.: ORB-SLAM2: an open-source SLAM system for monocular, stereo and RGB-D cameras. IEEE Trans. Robot. 33(5), 1255–1262 (2017). https://doi.org/10.1109/TRO.2017.2705103
Newcombe, R.A., Fox, D., Seitz, S.M.: DynamicFusion: reconstruction and tracking of non-rigid scenes in real-time. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2015
Pons-Moll, G., Romero, J., Mahmood, N., Black, M.J.: Dyna: a model of dynamic human shape in motion. SIGGRAPH 34(4), 120:1–120:14 (2015)
Quiroga, J., Brox, T., Devernay, F., Crowley, J.: Dense semi-rigid scene flow estimation from RGBD images. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8695, pp. 567–582. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10584-0_37
Richter, S.R., Hayder, Z., Koltun, V.: Playing for benchmarks. In: International Conference on Computer Vision (ICCV) (2017)
Scharwächter, T., Enzweiler, M., Franke, U., Roth, S.: Stixmantics: a medium-level model for real-time semantic scene understanding. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8693, pp. 533–548. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10602-1_35
Sevilla-Lara, L., Sun, D., Jampani, V., Black, M.J.: Optical flow with semantic segmentation and localized layers. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2016
Shashua, A., Gdalyahu, Y., Hayun, G.: Pedestrian detection for driving assistance systems: single-frame classification and system level performance. In: IEEE Intelligent Vehicles Symposium (IV), pp. 1–6, June 2004
Sturm, J., Engelhard, N., Endres, F., Burgard, W., Cremers, D.: A benchmark for the evaluation of RGB-D SLAM systems. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2012
Su, H., Qi, C.R., Li, Y., Guibas, L.J.: Render for CNN: viewpoint estimation in images using CNNs trained with rendered 3D model views. In: International Conference on Computer Vision (ICCV), December 2015
Sun, D., Sudderth, E.B., Pfister, H.: Layered RGBD scene flow estimation. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp. 548–556. IEEE (2015)
Sun, D., Yang, X., Liu, M.Y., Kautz, J.: PWC-Net: CNNs for optical flow using pyramid, warping, and cost volume. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
Ummenhofer, B., et al.: DeMoN: depth and motion network for learning monocular stereo. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Valgaerts, L., Bruhn, A., Zimmer, H., Weickert, J., Stoll, C., Theobalt, C.: Joint estimation of motion, structure and geometry from stereo sequences. In: Daniilidis, K., Maragos, P., Paragios, N. (eds.) ECCV 2010. LNCS, vol. 6314, pp. 568–581. Springer, Heidelberg (2010). https://doi.org/10.1007/978-3-642-15561-1_41
Varol, G., et al.: Learning from synthetic humans. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Vedula, S., Baker, S., Rander, P., Collins, R., Kanade, T.: Three-dimensional scene flow. In: International Conference on Computer Vision (ICCV), vol. 2, pp. 722–729 (1999)
Vijayanarasimhan, S., Ricco, S., Schmid, C., Sukthankar, R., Fragkiadaki, K.: SfM-Net: learning of structure and motion from video. arXiv abs/1704.07804 (2017)
Vogel, C., Schindler, K., Roth, S.: 3D scene flow estimation with a rigid motion prior. In: International Conference on Computer Vision (ICCV), pp. 1291–1298 (2011)
Vogel, C., Schindler, K., Roth, S.: Piecewise rigid scene flow. In: International Conference on Computer Vision (ICCV), pp. 1377–1384 (2013)
Vogel, C., Schindler, K., Roth, S.: 3D scene flow estimation with a piecewise rigid scene model. Int. J. Comput. Vis. 115(1), 1–28 (2015)
Vogel, C., Roth, S., Schindler, K.: View-consistent 3D scene flow estimation over multiple frames. In: Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T. (eds.) ECCV 2014. LNCS, vol. 8692, pp. 263–278. Springer, Cham (2014). https://doi.org/10.1007/978-3-319-10593-2_18
Wang, P., Li, W., Gao, Z., Zhang, Y., Tang, C., Ogunbona, P.: Scene flow to action map: a new representation for RGB-D based action recognition with convolutional neural networks. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), July 2017
Wedel, A., Brox, T., Vaudrey, T., Rabe, C., Franke, U., Cremers, D.: Stereoscopic scene flow computation for 3D motion understanding. Int. J. Comput. Vis. 95(1), 29–51 (2011)
Wulff, J., Sevilla-Lara, L., Black, M.J.: Optical flow in mostly rigid scenes. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR), July 2017
Xiao, J., Owens, A., Torralba, A.: SUN3D: a database of big spaces reconstructed using SfM and object labels. In: International Conference on Computer Vision (ICCV), pp. 1625–1632. IEEE Computer Society (2013)
Yin, Z., Shi, J.: GeoNet: unsupervised learning of dense depth, optical flow and camera pose. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2018)
Zhou, Q.-Y., Park, J., Koltun, V.: Fast global registration. In: Leibe, B., Matas, J., Sebe, N., Welling, M. (eds.) ECCV 2016. LNCS, vol. 9906, pp. 766–782. Springer, Cham (2016). https://doi.org/10.1007/978-3-319-46475-6_47
Zhou, T., Brown, M., Snavely, N., Lowe, D.G.: Unsupervised learning of depth and ego-motion from video. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (2017)
Acknowledgment
This work was partially supported by the National Science Foundation and National Robotics Initiative (Grant # IIS-1426998).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
1 Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Copyright information
© 2018 Springer Nature Switzerland AG
About this paper

Cite this paper
Lv, Z., Kim, K., Troccoli, A., Sun, D., Rehg, J.M., Kautz, J. (2018). Learning Rigidity in Dynamic Scenes with a Moving Camera for 3D Motion Field Estimation. In: Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y. (eds) Computer Vision – ECCV 2018. ECCV 2018. Lecture Notes in Computer Science(), vol 11209. Springer, Cham. https://doi.org/10.1007/978-3-030-01228-1_29
Download citation
DOI: https://doi.org/10.1007/978-3-030-01228-1_29
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-01227-4
Online ISBN: 978-3-030-01228-1
eBook Packages: Computer ScienceComputer Science (R0)