
Abstract
The Concept of constant false alarm rate CFAR detection is usually a requirement for any modern radar system. This paper proposes a generalization of a robust CFAR detector to account for the presence of thermal noise and interfering targets. We show via simulation results that the proposed detector keeps the CFAR property for a class of compound Gaussian clutter, namely: the K distribution, the Generalized Pareto distribution and the Compound Inverse Gaussian distribution. The results obtained show that the probability of false alarm is almost independent of the clutter parameter for all the cases studied.
You have full access to this open access chapter, Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
One of the most important tasks in a radar system is to maintain a constant false alarm rate CFAR against all kinds of background heterogeneities. The signals backscattered to the radar can be modeled statistically with various probability density functions pdf [1]. In high-resolution radars with low grazing angles, the sea clutter shows a significant deviation from gaussianity [2] and the conventional detectors are not able to maintain a constant false alarm rate. For this, several distributions were proposed in the literature to model sea clutter.The K distribution, the Generalized Pareto distribution, more recently the Compound Inverse Gaussian distribution were chosen as alternatives to the Gaussian model and are well adapted to impulsive clutter. However, these distributions remain unable to predict the effects related to the presence of heavy echoes. For this reason, these models have been successfully extended to include thermal noise. In high-resolution radars with low grazing angles, a lot of non coherent CFAR detectors have been proposed in the literature. The log-t [3], WH-CFAR [4], the log-t CFARD [5] are robust for the Weibull and log-normal. In [6], Jakubiak proposed a Log-t detector which attains the CFAR property for a shape parameter greater than one. Recently, a detector based on the Max-Mean operations was proposed for the compound Gaussian models and proved to be robust in terms of false alarm regulation [7]. In this paper we propose to generalize the Max-Mean detector to deal with the presence of thermal noise and interfering targets. In Sect. 2, we describe the proposed detector and the clutter models considered. Section 3 discusses the results obtained in different situations. Finally, some conclusions are drawn in Sect. 4.

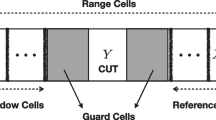
Block diagram of the modified detector
2 Proposed Modified Robust Detector in the Presence of Thermal Noise and the Interfering Targets
The bloc diagram of the detector under consideration is shown in Fig. 1.
Where the cell under test Z is compared to the adaptive threshold to decide about the presence (Hypothesis \(H_1\)) or the absence (Hypothesis \(H_0\)) of a target. The detector as proposed in [7] uses the maximum value and the mean value of the reference samples to set the adaptive threshold given by
Where \(\tau \) is a factor set to achieve a desired probability of False Alarm \(P_{fa}\). It was shown in [7] that this detector possesses the CFAR property for a class of compound Gaussian distributions if only four reference cells are considered. However, if one or more interfering targets are present in the reference window, the CFAR property is no longer guaranteed. For this reason, we propose a modified version of the detector proposed in [7] to deal with the presence of interfering targets. We also take into consideration the presence of thermal noise for the three distributions considered in this work, namely; the K distribution, the Generalized Pareto and the Compound Inverse Gaussian distribution. The proposed detector uses six reference cells instead of four. Then, these cells are ranked in an ascending order to obtain \(X_{(1)}\), \(X_{(2)}\),...,\(X_{(6)}\) and the two largest samples are censored. This means that this detector can deal with up to two interfering targets. The threshold is then computed using the remaining samples in the same manner as in [7]. That is
2.1 The K-Distribution Plus Thermal Noise
The K distribution is characterized by the shape parameter \(\nu \) and the scale parameter b. First, if the thermal noise is ignored, the probability density function pdf of the speckle and texture are expressed, respectively, by an Exponential distribution and a Gamma distribution [8]
The pdf of the K distribution is given by [8]
where \(K_{\nu -1}(.)\) is the modified Bessel function of the second kind, and \(\varGamma (.)\) is the Gamma function. In the case of the presence of thermal noise. The probability density function pdf of the speckle component becomes [8].
Where \(p_n =2\sigma ^2\) is the power of the thermal noise. The resulting pdf of K distribution plus noise becomes
2.2 The Generalized Pareto Plus Thermal Noise Distribution
The Generalized Pareto (GP) distribution is characterized by the shape parameter \(\alpha \) and the scale parameter b. Its pdf is given by
When the thermal noise is added to the speckle component, the resulting pdf becomes [9]
2.3 The Compound Inverse Gaussian Plus Thermal Noise Distribution
The Compound Inverse Gaussian (CIG) distribution is characterized by a texture obeying to the inverse Gaussian. It is characterized by the shape parameter \(\lambda \) and the mean \(\mu >0\). If the thermal noise is ignored, the pdf is of the form [10]
When the thermal noise is not ignored the speckle can be rewritten as [10]
And the resulting pdf for \(0 \le x \le \infty \) becomes
3 Results and Discussions
To illustrate the performance of the proposed detector in terms of the false alarm regulation, we simulated \(P_{fa}\) with respect to the factor \(\tau \) for the three clutter distributions mentioned above and in different situations. We used (N = \(10^6\)) Monte Carlo runs in order to attain a \(P_{fa}\) equal to \(10^{-4}\). The thermal noise power \(p_n\) was set to 0.5, and the target is assumed to be fluctuating according to the Swerling I model. The Interference-to-Clutter Ratio (ICR) is assumed to be equal to 20 dB.
Figures 2 and 3 show the variation of \(P_{fa}\) against the threshold factor \(\tau \) for the K distribution clutter for different values of \(\nu > 1\) and a fixed value of b to 1, in the case of the presence of thermal noise and two interfering targets in the reference cells respectively. It is clear that all the curves almost overlap proves the ability of the proposed detector to maintain the CFAR property independently of \(\nu \) and b. In Figs. 4 and 5, we conducted the same simulations for the Generalized Pareto clutter. The same pattern is observed for a shape parameter greater than 1. In Figs. 6 and 7, we plotted \(P_{fa}\) versus the scale factor \(\tau \) for different values of the shape parameter \(\lambda \) of the CIG distribution of the clutter. Again the different cures overlap even for the case of a very spiky clutter \((\lambda \simeq 0)\). It is also noticed in all the cases studied that the presence of thermal noise or in the presence of interfering targets does not affect the robustness of the proposed detector.

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the K-distribution with b = 1 and N = \(10^6\), in the presence of thermal noise

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the K-distribution with b = 1 and N = \(10^6\), in the presence of thermal noise and two interfering targets

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the Generalized Pareto with b = 1 and N = \(10^6\), in the presence of thermal noise

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the Generalized Pareto with b = 1 and N = \(10^6\), in the presence of thermal noise and two interfering targets

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the Compound Inverse Gaussian with \(\mu = 1\) and N = \(10^6\), in the presence of thermal noise

Variation of \(P_{fa}\) versus the scale factor \(\tau \) for the Compound Inverse Gaussian with \(\mu = 1\) and N = \(10^6\), in the presence of thermal noise and two interfering targets
4 Conclusion
In this paper, we have proposed a generalization of a robust detector that deals with the presence of thermal noise and interfering targets in compound Gaussian clutter. The results obtained prove that the proposed detector attains the CFAR property in the presence of thermal noise and two interfering targets in the reference cells, for The K distribution, the Generalized Pareto distribution and the Compound Inverse Gaussian distribution. In all the situations studied, the \(P_{fa}\) curves showed that the latter is almost independent of the clutter parameters except for the K distribution where the robustness is observed for a shape parameter greater than one.
References
Conte, E., Maio, A.D.: Statistical analysis of real clutter at different range resolutions. IEEE Trans. AES 40(3), 903–918 (2004)
Billingsley, J.B.: Low Angle Radar Land Clutter. William Andrew Publishing, Inc., Norwich (2002)
Weinberg, G.V., Glenny, V.G.: Enhancing Goldstein’s log-t detector in Pareto distributed clutter. IEEE Trans. Aerosp. Electron. Syst. 53, 1035–1044 (2017)
Weber, P., Haykin, S.: Ordered statistic CFAR processing for two-parameter distributions with variable skewness. IEEE Trans. AES AES–21, 819–821 (1985)
Goldstein, G.B.: False-alarm regulation in log-normal and Weibull clutter. IEEE Trans. Aerosp. Electron. Syst. AES–9, 84–92 (1973)
Watts, S.: The performance of cell-averaging CFAR systems in sea clutter
Zebiri, K., Soltani, F., Mezache, A.: Robust non-parametric CFAR detector in compound Gaussian clutter. In: 3rd International Conference on Frontiers of Signal Processing, 6–8 September 2017, Paris, France (2017)
Ward, K.D., Tough, R.J.A., Watts, S.: Sea Clutter: Scattering, the K-distribution and Radar Performance, 2nd edn. Institution of Engineering and Technology, London (2013)
Mezache, A., Chalabi, I., Soltani, F., Sahed, M.: Estimating the Pareto plus noise distribution parameters using non-integer order moments and [zlog(z)] approaches. IET Radar Sonar Navig. 10(1), 192–204 (2016)
Mezache, A., Soltani, F., Sahed, M., Chalabi, I.: Model for non-Rayleigh clutter amplitudes using compound inverse Gaussian distribution: an experimental analysis. IEEE Trans. Aerosp. Electron. Syst. 51, 142–153 (2015)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2018 Springer International Publishing AG, part of Springer Nature
About this paper

Cite this paper
Guidoum, N., Soltani, F., Zebiri, K., Mezache, A. (2018). Robust Non Parametric CFAR Detector in Compound Gaussian Clutter in the Presence of Thermal Noise and Interfering Targets. In: Mansouri, A., El Moataz, A., Nouboud, F., Mammass, D. (eds) Image and Signal Processing. ICISP 2018. Lecture Notes in Computer Science(), vol 10884. Springer, Cham. https://doi.org/10.1007/978-3-319-94211-7_21
Download citation
DOI: https://doi.org/10.1007/978-3-319-94211-7_21
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-319-94210-0
Online ISBN: 978-3-319-94211-7
eBook Packages: Computer ScienceComputer Science (R0)
